7. 3. 8. Метод динамического программирования
Метод динамического программирования как Дополнение.
По сути именно в этом методе выражается практически вся Теория Управления.
То есть, его можно рассматривать как краткое символьно-алгоритмическое выражение Полной Функции Управления, всего, что было затронуто в курсе «Достаточно Общая Теория Управления». Для начала рассмотрим рисунок из Достаточно Общей Теории Управлений.
Как его понимать?
А вот понимать его оказывается невозможно, если вы не владеете, не освоили миропонимание мозаичное на основе триединства Материи – Информации – Меры.
Если вы освоили триединство, и вы понимаете, что Мир, в котором мы живём, наши организмы – часть этого Мира, и что в каждом объекте, в котором наша психика в состоянии выделить в этом Мире присутствует три аспекта бытия:
- Материя.
- Информация.
- Мера.
Материальный аспект – то, что существует, то, что взаимодействует друг с другом.
Это материя во всех её возможных агрегатных состояниях: вещество твёрдое, жидкое, газообразное, плазма – когда атомы теряют электронные оболочки. Дальше – физические поля, микрочастицы и, в конце концов, вакуум, который является не пустотой, а одной из форм организации материи, одним из агрегатных состояний. Вакуум – исходное состояние, которое порождает все остальные агрегатные состояния материи.
Ну, это дальше вопросы физики, в которые сейчас углубляться не стоит, потому что в понимании приверженцев Концепции Общественной Безопасности правильная физика должна быть в обществе с Праведной Нравственностью.
Потому что если нравственность «неправильная», а физика адекватная, то люди с неправильной нравственностью в ходе внутривидовой конкуренции в состоянии уничтожить может быть даже ни одну галактику просто так, в порядке самоутверждения.
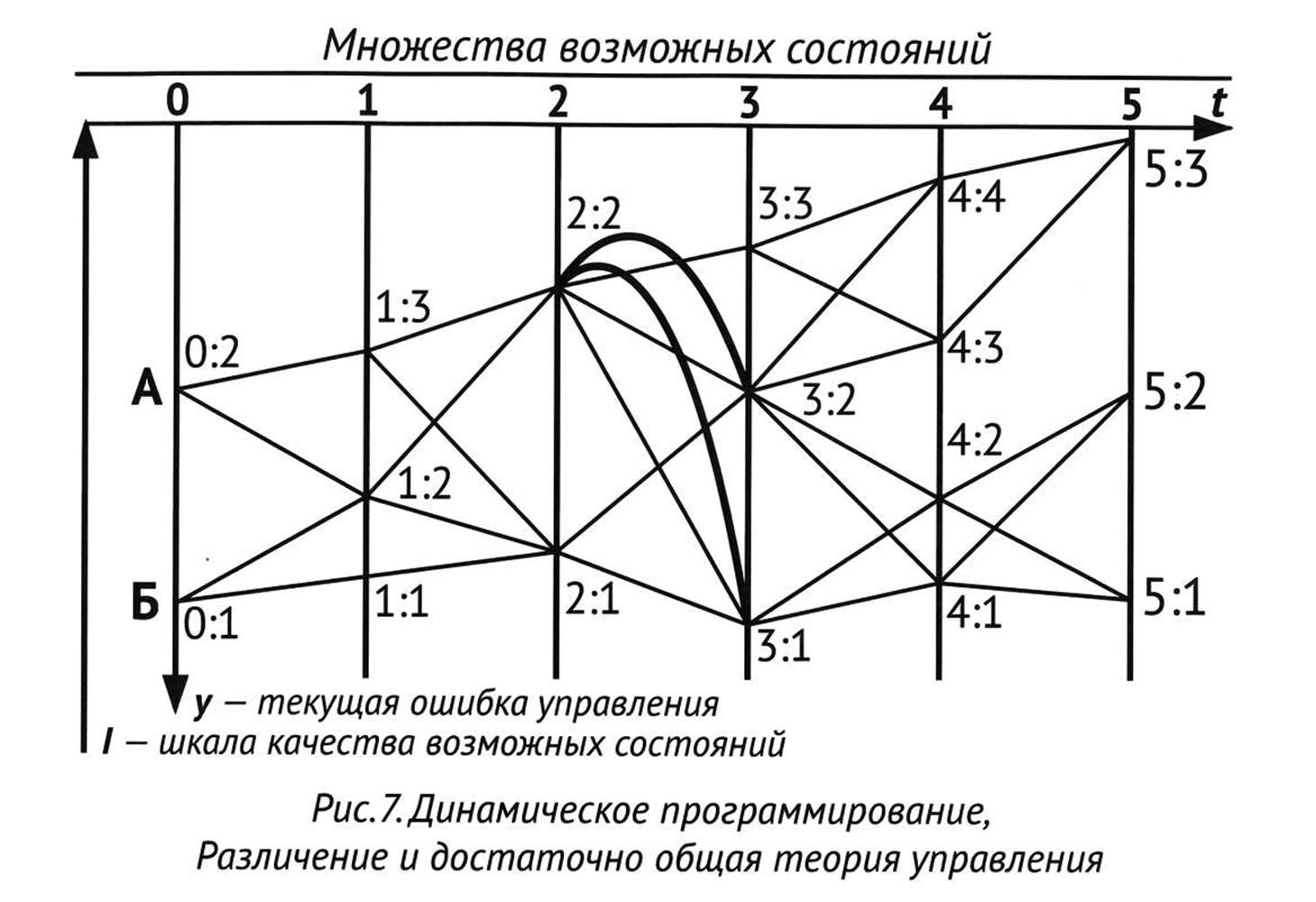
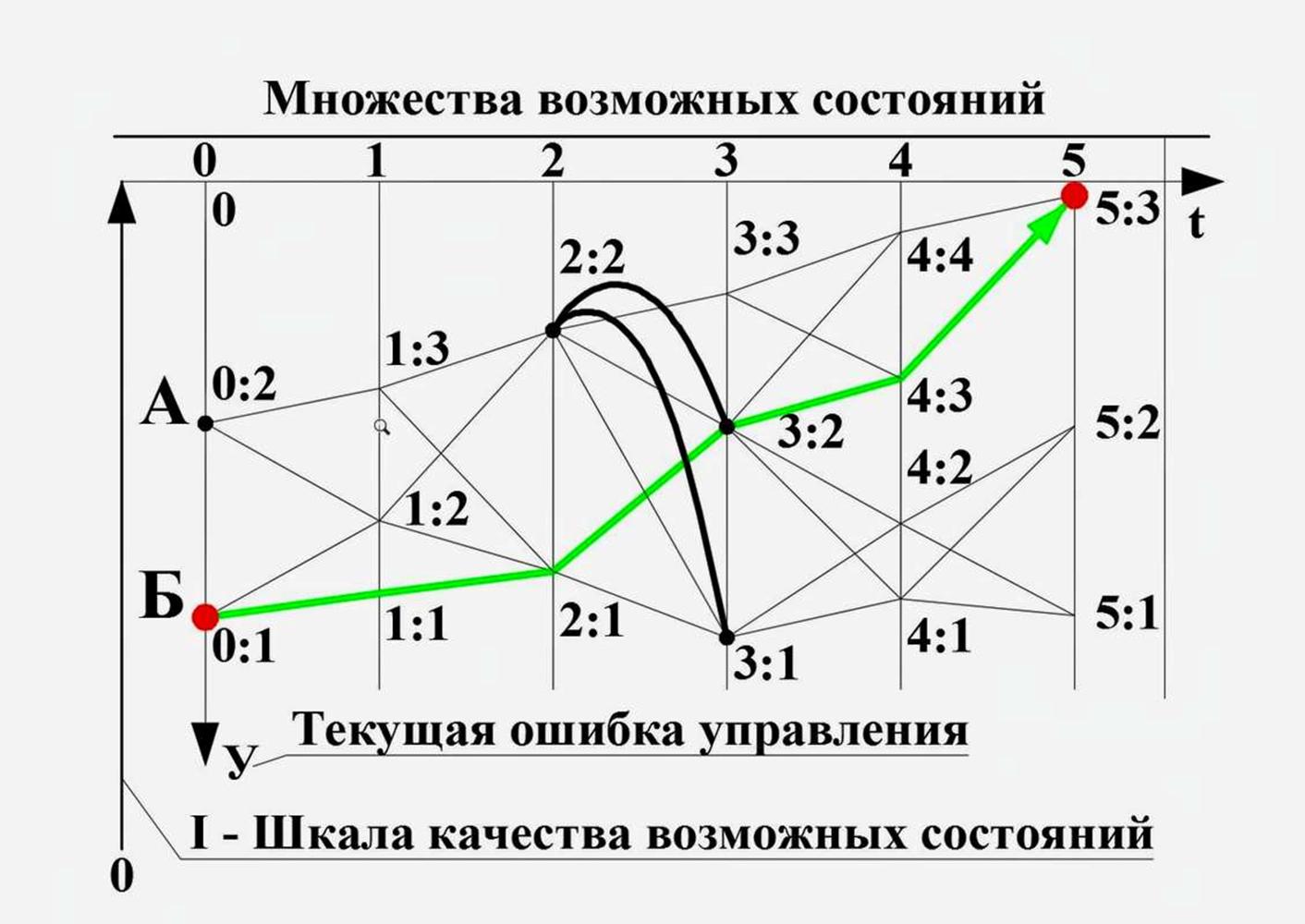
Мерный аспект – это матрица возможных состояний материи. Матрица возможных состояний материи и путей перехода материи из одних состояний в другие задаёт, в общем-то, всё, все возможности Бытия как в масштабах Мироздания в целом, так и в меньших масштабах, в границах каких-либо меньших. По отношению к материи – это матрица возможных состояний, а по отношению к Информации – это система кодирования информации, потому что восприятие информации без системы кодирования, – оно, в принципе, невозможно. Если в вашем телевизоре нет аппаратно-прошитой системы кодирования информации, либо телевизор уже работает на основе некой операционной системы информационно-алгоритмического обеспечения работы, нет запрограммированной алгоритмически системы кодирования информации, то просмотр соответствующих каналов для вас будет невозможен. Это вот то, что касается триединства. Этот рисунок (представленный выше) – это, в общем-то, тоже метафора, – это матрица возможных состояний. Некоторая матрица условно представлена, но она не беспорядочно представлена. Вот нулевое состояние, первое, второе, третье, четвёртое, пятое. Всё это множество возможных состояний. Чтобы связать с теорией управления, слева помещены две шкалы. Шкала качества возможных состояний «I», т. е. качество возрастает по направлению вверх и шкала текущей ошибки управления «У», т. е. каждое состояние в любом из множеств характеризуется удалённостью от хронологической верхней оси.
Ну, а качество, как вы знаете, – это некая оценка вектора ошибки управления.
На нашем рисунке вот текущая ошибка управления – одномерная просто для упрощения, хотя может быть и не один такой рисунок, в котором другие параметры кроме «У» характеризуют текущую ошибку управления как компоненту многомерного вектора ошибки управления. Но это не должно вас смущать, потому что главное понять, – что есть что.
И соотношение ошибок управления и качества управления, – оно таково, что когда достигается положение на верхней хронологической оси «t», то это наилучшее состояние, которым может обладать объект управления.
А дальше вот смотрите. Есть в нулевом множестве состояний два положения. Они обозначены буковками «А» и «Б» и, кроме того, – циферками через двоеточие – «0: 1» и «0: 2»: «0» – это номер множества, «1» и «2» – это положение в порядке убывания текущей ошибки управления. То, что ось хронологическая, ну, надо понимать в том смысле, что время – это следствие меры. Если есть некая периодичность, и если есть некая поэтапность, то с нею можно связать понятие меры. Здесь есть поэтапность, потому что после нулевого множества идут первое, второе, третье, четвёртое и пятое множества. В каждом из этих множеств есть некоторое количество возможных состояний объектов. В первом множестве – три. Во втором множестве – два. В третьем – снова три, в четвёртом – четыре, в пятом – три. И все эти множества связаны друг с другом некоторыми путями перехода. И вот посмотрите, пути перехода, нами были нарисованы так, что и из положения «Б», и из положения «А» в пятом множестве вы можете попасть в любую из трёх возможных точек: «5: 1», «5: 2», «5: 3». Но только точка «5: 3» будет наилучшим вариантом решения всех управленческих задач.
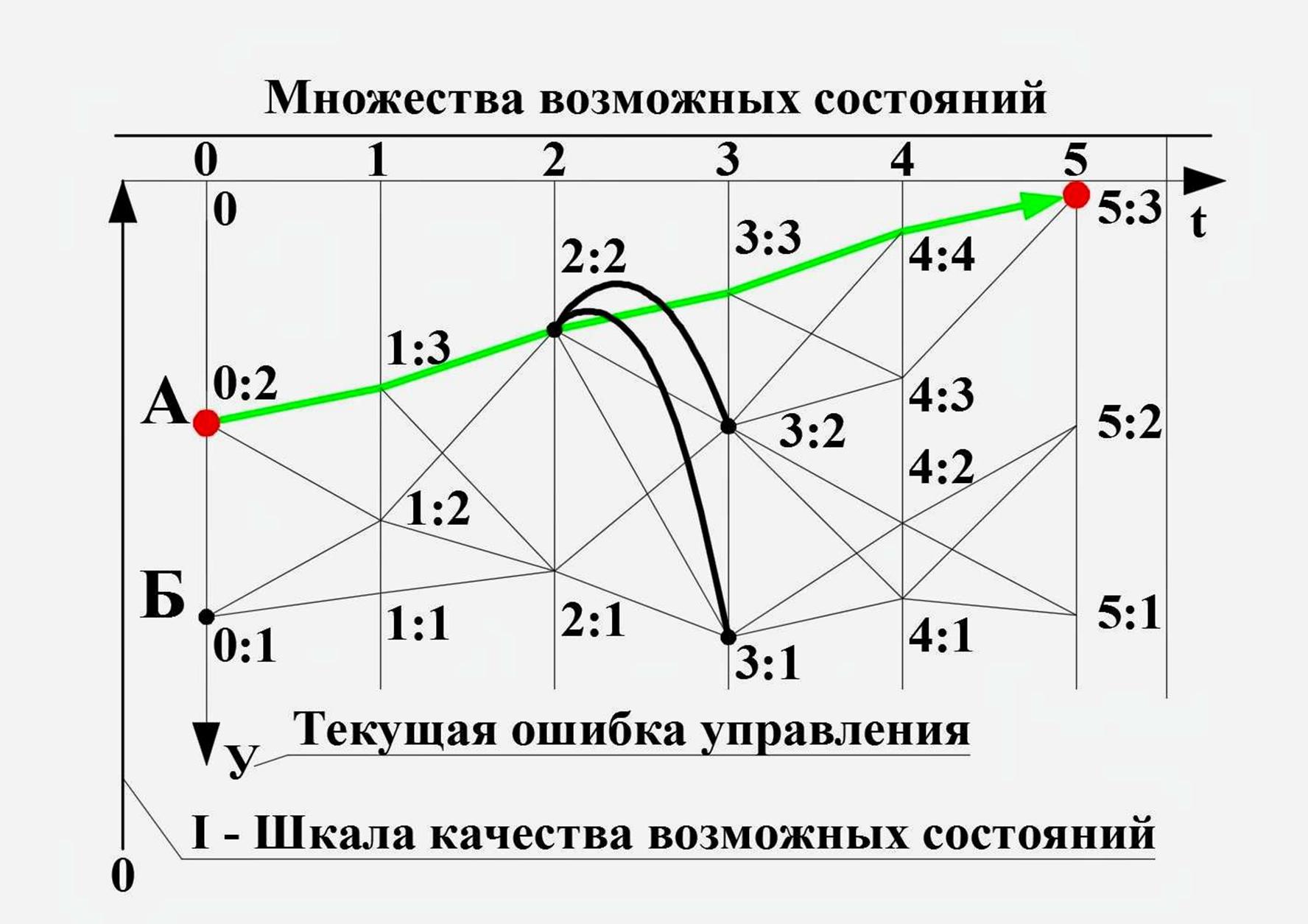
Дальше в методе динамического программирования речь идёт об оценке качества процесса управления, всего процесса управления. И, соответственно, вот такому подходу и нашей интерпретации изображения на рисунке из пункта «А» в точку «5: 3» можно прийти разными путями и из пункта «Б» в точку «5: 3» можно прийти разными путями. Но все эти пути будут различны по качеству управления, потому что наилучший путь – это тот путь, в котором площадь между траекторией и хронологической осью – это минимальная площадь. Т. е. вот смотрите, если мы идём из точки «А», то наилучший, в смысле качества управления путь – это путь «0: 2» → «1: 3» → «2: 2» → «3: 3» → «4: 4» → «5: 3»,
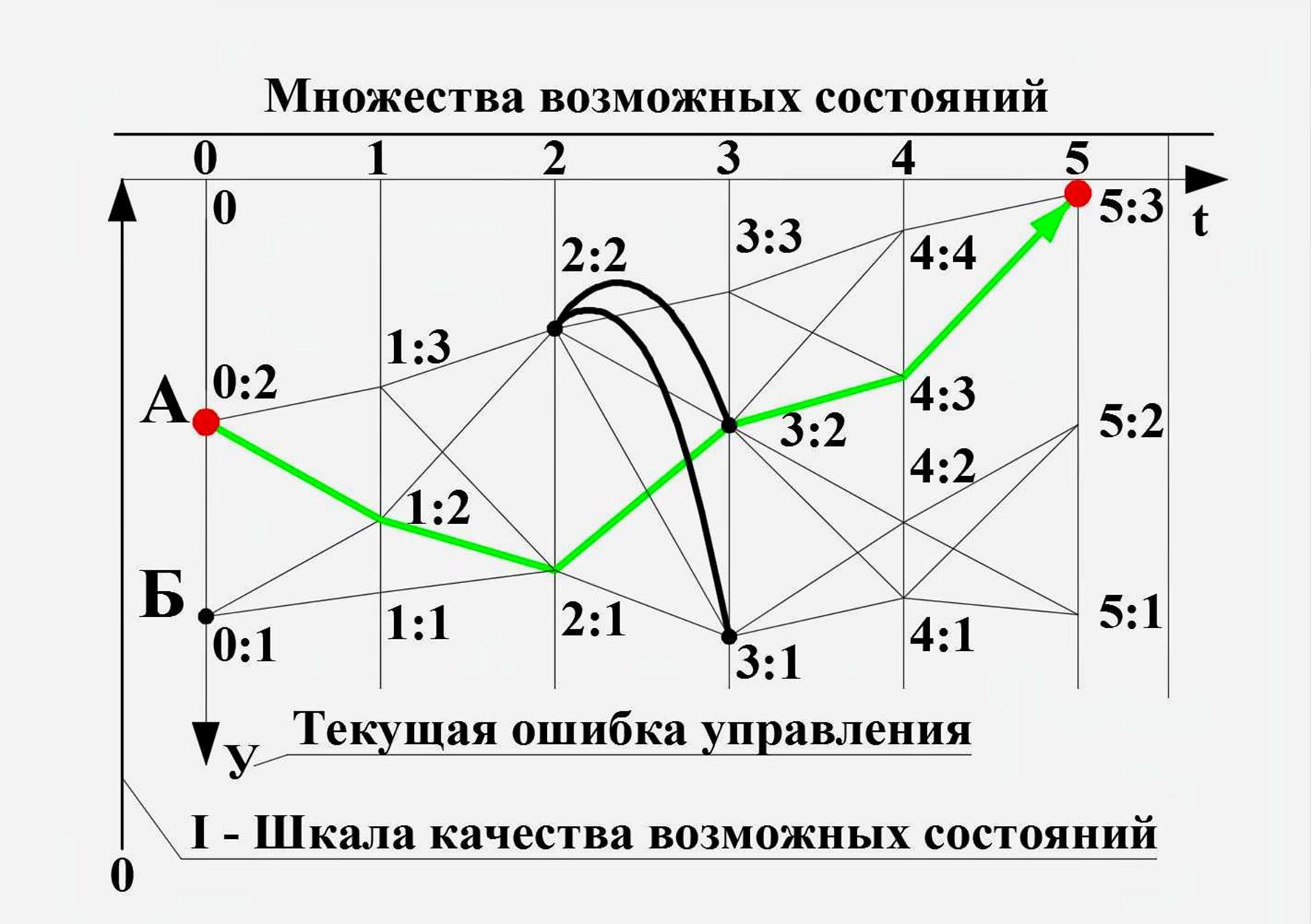
а наихудший путь, позволяющий прийти в точку «5: 3» из точки «А», – это «0: 2» → «1: 2» → «2: 1», далее «3: 2» → «4: 3» и «5: 3».
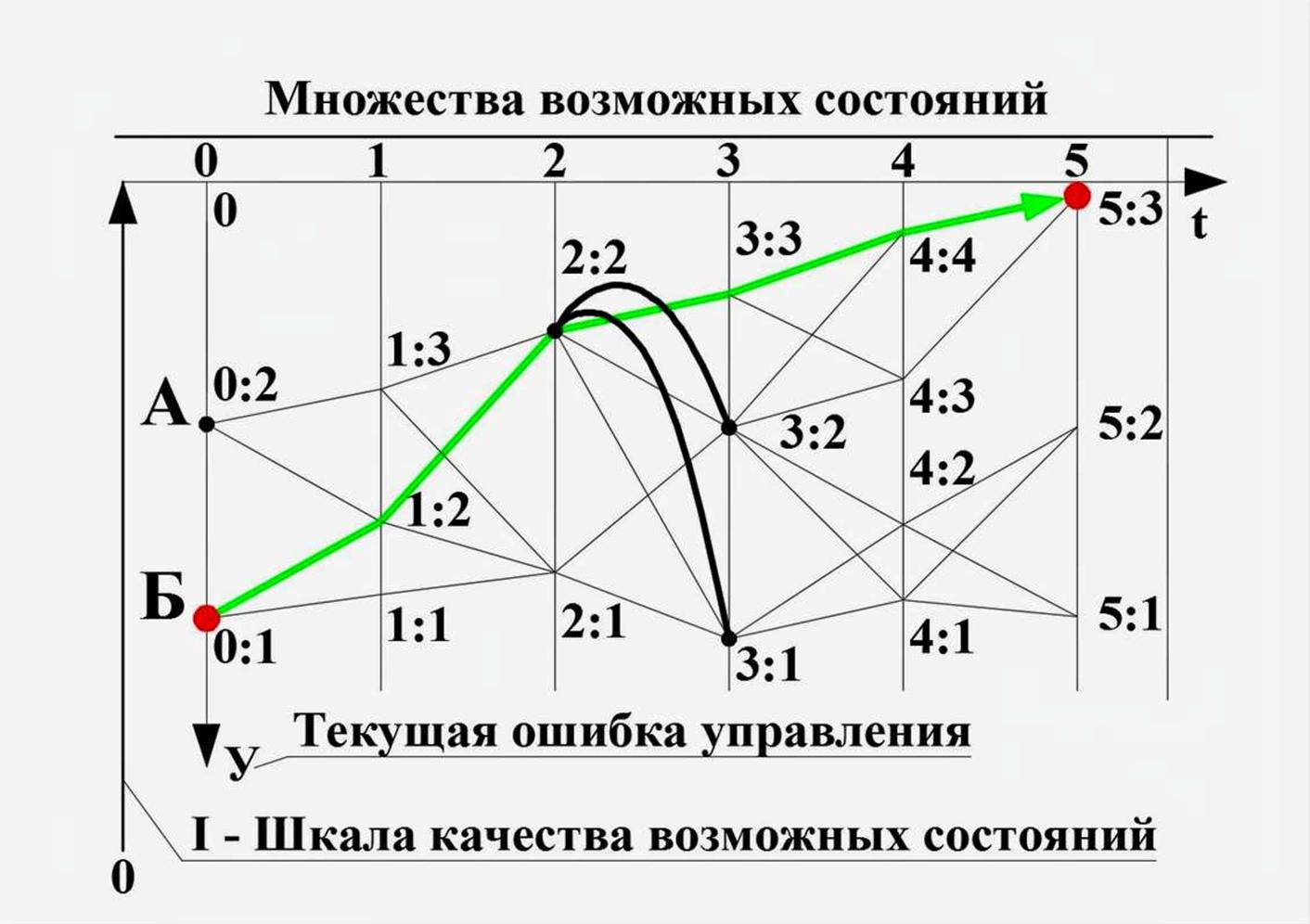
Из точки «Б» в точку «5: 3» тоже можно прийти разными путями. Наилучший путь: «0: 1» → «1: 2» → «2: 2» → «3: 3» → «4: 4» → «5: 3».
Наихудший путь из точки «Б» – «0: 1» → «1: 1» → «2: 1» → «3: 2» → «4: 3» → «5: 3».
То есть, и объект «А», и объект «Б» могут быть переведены из исходных состояний в идеальное состояние, но всё определяется характером управления в переходных процессах и исходным положением каждого из объектов, т. е. объект «Б» находится в условиях изначально более худших, чем объект «А». Его текущая ошибка управления в нулевом множестве выше и качество состояния тоже хуже. Тем не менее, он может прийти в идеальное состояние «5: 3».
Ну, теперь давайте посмотрим в матрицу.
Вот объект «А» изначально обладает определённым преимуществами перед объектом «Б», но реализация этого преимущества, в смысле гарантированного прихода в точку «5: 3», – она для него не гарантирована.
Но, во-первых, из состояния «0: 2» он может идти в состояние «1: 2». Далее – в «2: 1», в «3: 1» → «4: 1» → «5: 1». То есть, он будет деградировать, потому что ошибка управления текущая, интегральная, т. е. по совокупности всех множеств, – она будет нарастать.
Объект «Б» тоже может оказаться в положении «5: 1», ну, в силу особенностей управления.
Но особенности управления, – они могут быть обусловлены тем, что субъекты-управленцы не видят просто путей перехода объекта «А» и «Б» из исходного положения в идеальное положение «5: 3».
Почему не видят?
Ну, причины могут быть разные. Чувство Меры не развито настолько, чтобы проощущать возможность перехода. Чувства Меры развиты достаточно, но нравственность такова, что в Различении не даются пути перехода. Поэтому, если смотреть на матрицу как на безотносительность субъектов управления, то стартовые условия объекта «А» лучше, чем объекта «Б».
Но если затрагивать субъективные вопросы качества субъектов-управленцев, то если управляющий субъектом «Б» видит всю матрицу и видит все пути перехода, то для него вполне возможен путь «0: 1» → «1: 2» → «2: 2» → «3: 3» → «4: 4» → «5: 3», и он может его реализовать.
А вот если субъект, который взялся за управление объектом «А» не видит путей перехода в точку «5: 3», в силу неразвитости чувства Меры.
Или в силу того, что его нравственность такова, что это ему не даётся в различении или в силу извращённости интеллекта, вследствие неправильной нравственности, он оценивает положение «5: 3» как неприемлемое для себя. То он поведёт объект «А» в какую-то другую возможную точку: «5: 2», «5: 1», как вариант.
Но возможны ситуации, что он вообще не видит будущего дальше, ну, допустим четвёртого множества или ещё более кошмарная ситуация, когда он не видит будущего дальше второго множества.
В этом случае он может привести объект в точку «2: 2», а далее произойдёт неуправляемый срыв управления и тут вот показаны жирным выделением криволинейные траектории из точки «2: 2»: «2: 2» → «3: 2» и «2: 2» → «3: 1». Они отличаются тем, что если вы попали в точку «3: 2», то вы ещё можете вернуться на наилучшую траекторию, либо через «4: 4» и прийти в «5: 3», либо прийти несколько худшим путём через «4: 3», но тоже вы придёте в точку «5: 3». А вот если после точки «2: 2» вас угораздило упасть на «3: 1», то в лучшем случае вы сможете достичь положения «5: 2», а в худшем случае – положение «5: 1».
Но это мы рассмотрели прохождение точки «2: 2» в случае, если глубина прогноза была недостаточной и положение «5: 3» не было видно субъекту-управленцу.
Но когда дело доходит до реализации процесса управления, то даже в случае, если вы видите «5: 3», вы должны обеспечивать устойчивость течения процесса управления.
То есть, на всех переходах ошибки управления должны быть в пределах допустимого так, чтобы не происходило срывов управления. Потому что возможные срывы управления, ну, вот в положении «1: 3» вместо «2: 2» вы можете оказаться в положении «2: 1», если не сможете обеспечить необходимое качество текущего управления.
Но из этого положения вы сможете вернуться некоторым образом в положение «5: 3» в конечном итоге.
Ну, а если срыв управления произошёл в положении «2: 2» или на пути из «2: 2» в «3: 3».
То вы оказываетесь либо в «3: 2» и ситуация ещё исправима, либо в положении «3: 1», когда ситуация ведёт вас в лучшем случае – в «5: 2», в худшем случае – в «5: 1». Но можно предположить, что самые худшие варианты вот на этой схеме не показаны и возможные провалы – в положении ниже, чем «5: 1», которые будут просто катастрофическими.
Понимаете, вот эта вот схема, – она в материалах Достаточно Общей Теории Управления – завершающая схема, аналогичная трём предшествующим схемам, на которых строится объяснение того, что такое метод динамического программирования и как им пользоваться.
Но дальше возникают вот такие вещи, связанные с пониманием Достаточно Общей Теории Управления, пониманием сути времени, как не объективного, а субъективно-обусловленного явления. В большинстве своём достаточно часто люди свой выбор эталона времени берут из циклов природы, на основе которого строится восприятие времени. То естественно он субъективен и в зависимости от того, какой эталон мы выбираем, то мы и получаем.
Но здесь важно то, что матрица, – она содержит в себе все возможные состояния объектов управления, которые мы рассматриваем, и она содержит в себе их, ну, если хотите одновременно. А если не нравится слово «одновременно», то можно сказать без привязки ко времени, безвременно, т. е. времени нет.
И в этом смысле, если вы, грубо говоря, через воображение, видите весь путь из исходного состояния в конечный до идеального состояния. То для вас нет принципиальной разницы между прошлым, настоящим и будущим.
В аспекте управления и в аспекте понимания управления как процессов триединства Материя – Информация и Мера – это означает то, что после того, как вы определились с путём, то путь в матрице изначально пустой или лучше сказать, невозбуждённый.
И именно после выбора пути он начинает заполняться определённой материей, энергией, как материей в переходных формах из одного агрегатного состояния в другие.
По большому счёту, он обретает соответственную материальную наполненность.
По сути, происходит формирование воплощения, материализации.
После этого, процесс, в общем-то, самореализуется.
И дальнейшая задача заключается только в том, чтобы в процессе самореализации не была утрачена эта его наполненность матрицы энергией, материей и информацией.
Дальше из всего этого формируются выходы на управление, как таковое, в социальной среде, управление в технике, в техносфере.
А также и выходы туда, что считается невозможной «магией», т. е. когда субъективное воздействие некоторым образом влечёт за собой последствия в объективном Мире, общем для нас всех.
Что ещё есть?
А ещё есть чувство Меры.
Ну, в общем, чувство Меры, в данном случае, представленном на этой схеме должно быть очень хорошо развитым, для того чтобы человек правильно оценивал своё исходное состояние. Потому, что если вы пребываете в иллюзии, что вы находитесь в точке «0: 2», а фактически вы находитесь в точке «0: 1». То путь «0: 2» → «1: 3» → «2: 2» → «3: 3» → «4: 4» → «5: 3» и многие другие пути, которые ведут из точки «0: 2», – они для вас объективно невозможны.
Но если вы пребываете в иллюзии, вы можете предпринять управленческие действия, которые направлены на переход на первом шаге из «0: 2» в «1: 3».
Фактически в «1: 3» вы не можете попасть. Потому, что вы находитесь в положении «0: 1» и в лучшем случае, в результате этого, вы окажетесь в положении «1: 2». А в худшем варианте у вас произойдёт срыв управления, и в итоге вы не попадёте даже в положение «1: 1», а провалитесь куда-то ниже по оси состояний объектов во множестве «1».
То есть, приведенная схема такова, что на основе её можно изложить, в общем-то, всю Теорию Управления и показать, что метод динамического программирования – это действительно алгоритмическое выражение всей Теории Управления, именно как теории, построенной на основе концепции триединства Материи – Информации – Меры.
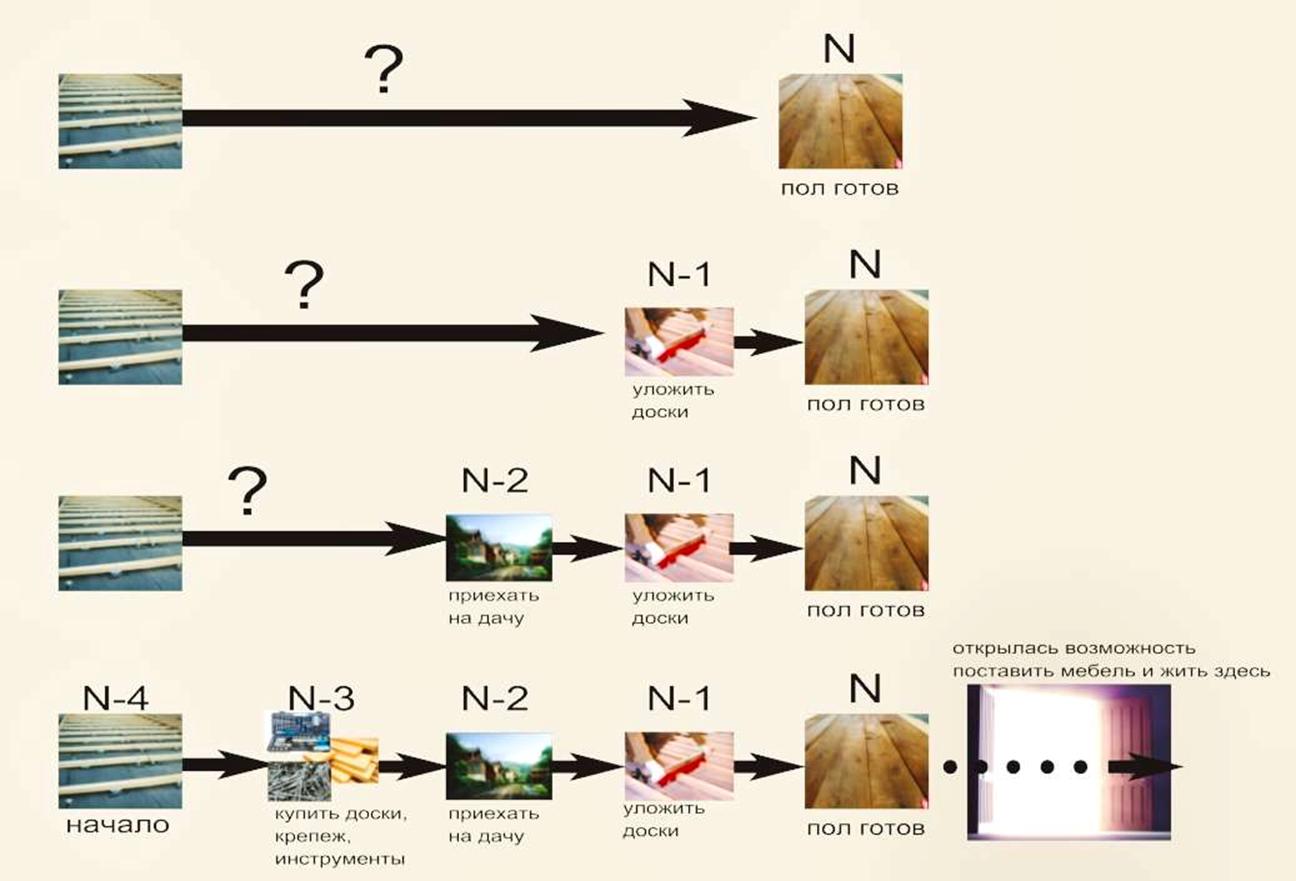
Теперь посмотрим ещё на одну картинку.

В общем, это та же самая картинка, взятая из курса Достаточно Общей Теории Управления, но привязанная к судьбе человека.
Это не мы делали.
Это сделал кто-то другой из пользователей системы, кто продрался через абстракции Достаточно Общей Теории Управления и вот эту картинку смог интерпретировать по отношению к возможности личностного развития человека.
И вот у него получается, что из худшего положения «0: 1» несколькими путями всё-таки индивид может выйти на уровень человека состоявшегося. Но из лучшего положения «0: 2» другой индивид точно также может опуститься до уровня бомжа или люмпена.
В общем, это картинка радостна в каком смысле?
В том смысле, что тексты Достаточно Общей Теории Управления не остались бесплодными. Кому-то это поможет реально решить проблемы его жизни.
Ну, а по отношению к обществу это поможет решить проблемы общества, человечества в целом, придать глобализации правильное течение, правильную направленность, и всё в итоге будет хорошо.
См. практики в соответствующих параграфах тектса главы:
/7. 4. 10. ПФУ 8 Метод Динамического Программирования/
См. дополнительные пояснения.
Видео:
/7190_Пример неосознанного МДП Зазнобин/
/7189_Метод динамичного программирования/
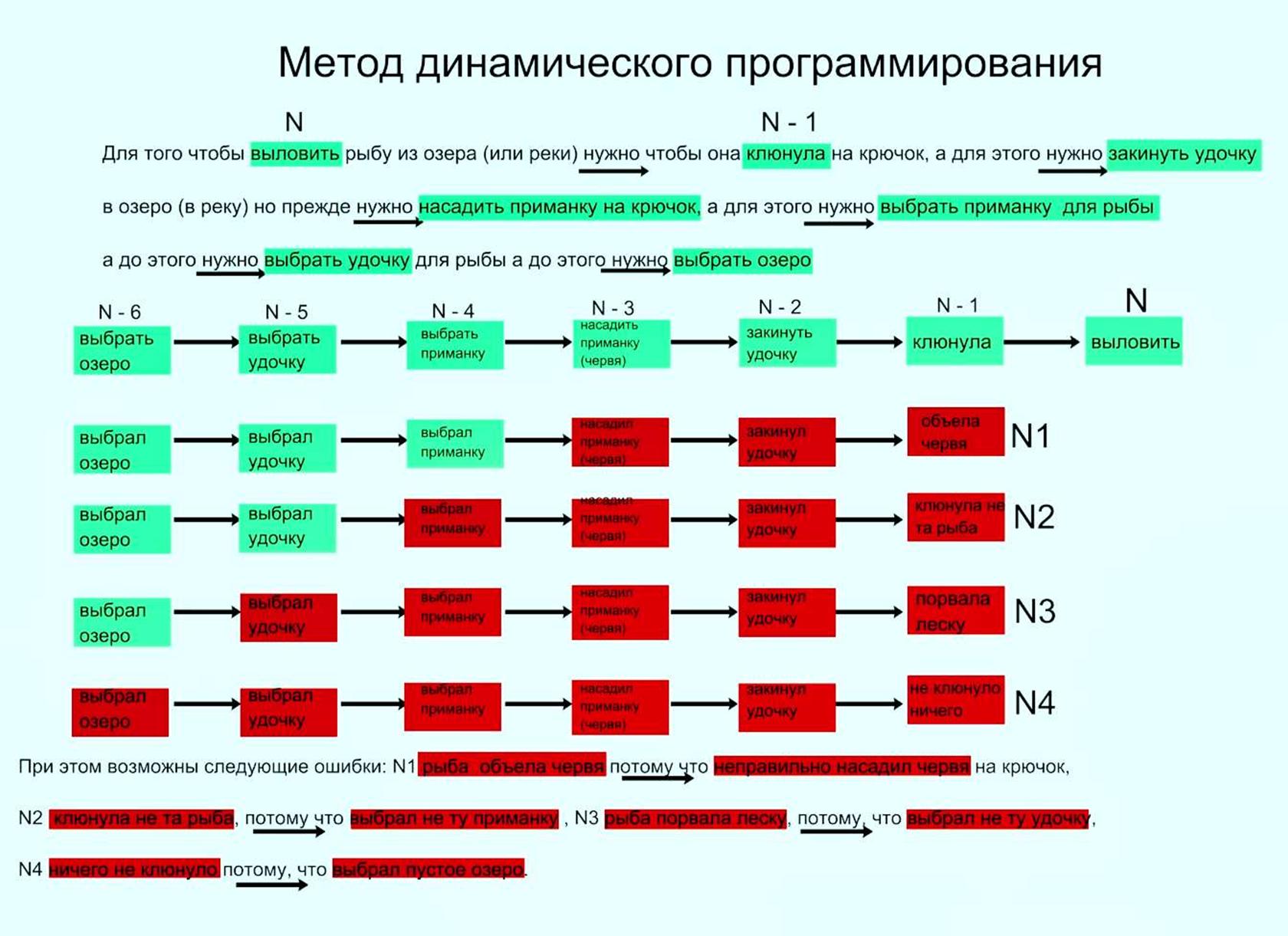
Как дополнение в графическом виде для понимания сути МДП смотри нижние рисунки:
№ 1
№ 2
 Следующая страница ➤
Следующая страница ➤

Данилёнок Вадим Евгеньевич
С этого места Вы можете бесплатно скачать книгу по материалам сайта и выразить благодарность автору по указанной ссылке
СКАЧАТЬ КНИГУ БЕСПЛАТНО
или нажав на верхнюю картинку
* * * * * * * * *