7. 3. 3. Целеполагание
Целеполагание в отношении выявленного фактора.
По своему существу целеполагание представляет собой формирование вектора целей управления в отношении данного фактора и внесение этого вектора целей в общий вектор целей субъекта-управленца.
Целеполагание может быть различным.
Самая простая реакция – уйти из-под воздействия этого фактора.
Да, такая реакция возможна. Но последствия такой реакции могут быть неприятны в отдалённой перспективе. Потому что, если вы выявили какую-то возможность неприятностей на первом этапе, а на третьем этапе решили, что вас это не касается. То в жизни могут возникнуть ситуации, когда возможность начнёт реализовываться сама, и вам, как говорится, мало не покажется.
Поэтому вопросы целеполагания надо обязательно решать и решать по всем частным процессам управления, которыми вы претендуете управлять или которые де-факто находятся под вашим управлением.
К тому же, вопросы целеполагания надо решать исходя из того, как эти цели связаны с иерархически высшими объемлющими по отношению к вашему процессу управления другими процессами. Потому, что если вы пытаетесь игнорировать в вопросах целеполагания объемлющие процессы и не учитываете имеющуюся иерархию. То для вас будет совершенно разгромным событие, к примеру, когда некий новый министр экономики может подмахнуть какой-то документ, в результате чего ваш бизнес-план пойдёт крахом.
Следовательно, не учитывать иерархию воздействий это глупо.
Или, к примеру, если вы ставите своей задачей не опоздать на Титаник, который готовится уйти в свой первый рейс, то у вас будут неприятности, когда Титаник встретится с айсбергом.
Хотя Титаник – это прошлое, но, тем не менее, Титаник – это метафора, которая позволяет объяснить в жизни очень многое. Поэтому целеполагание в отношении выявленного фактора – это тоже очень важный этап.
Простое целеполагание в режиме прямого ухода от проблемы или в режиме прямой реакции на действия окружающей среды в виде «вопрос – ответ», это режимы гонки за уходящим автобусом.
Но есть лучшие варианты, это варианты профилактирование проблемы. Когда вы входите в управление частным процессом в русле объемлющего процесса, текущего в схеме «предиктор-корректор».
К примеру, если говорить о том, что мы сейчас переживаем в России, то мы переживаем, последствия того, что в эпоху до крещения Руси кто-то на Руси не прореагировал должным образом на новую информацию. На информацию, о начале нового проекта скупки мира, на основе монополии на ростовщичество. Поэтому вопросы целеполагания, – они действительно очень важные. И важны они именно в том, что могут проявляться такие обстоятельства, которые характеризуются афоризмом Козьмы Пруткова:
«От малых причин бывают большие следствия».
Целеполагание обычно протекает не на пустом месте. Обычно, когда вы начинаете заниматься целеполаганием, то у вас уже есть некий вектор целей, и, соответственно, встаёт вопрос о том, как ваше целеполагание в отношении вот этого выявленного фактора среды будет взаимодействовать с тем вектором целей, который вы уже поддерживаете. Либо вы успешно интегрируете новую цель в тот вектор целей, в соответствии с которым вы живёте и действуете, либо может сложиться такая ситуация, что новая цель будет не совместима с тем вектором целей, с которым вы живёте. И, соответственно, если она не совместима – это поставит вас перед вопросом о том, как отказаться либо от новой цели, либо от тех целей, которые вы поддерживали к моменту определения задания вот этой вот новой цели.
После того как мы выявили фактор среды в первом пункте ПФУ, который нас стимулирует к неким действиям, мы его охарактеризовали, разложили МИМ, дали полноценное определение, наделили образом с конкретным раскрытием факторов, как и чем, он на нас давит. После чего на основе метрологически состоятельных описаний и некой модели возможных последствий, как прогноза мы приняли начальное решение относительно выявленного фактора среды, который давит:
- Игнорировать полностью или игнорировать и создать систему контроль по важным параметрам.
- Приспособиться к нему, и согласовать с личным вектором целей, не забывая постоянно собирать новую информацию.
- Предпринять действия к управлению самим фактором по ПФУ.
Теперь наша задача заключается в том, чтобы полноценно сформировать целеполагание относительно нашего выявленного фактора среды, который на нас давит. И здесь уже надо твердо принимать решение.
Любо мы Игнорируем фактор среды либо мы начинаем управлять.
Для этого нам необходимо разобраться с тремя категориями.
- Вектор целей управления.
- Вектор состояния.
- Вектор ошибки.
Повторим ещё раз, третий этап Полной Функции – это целеполагание в отношении фактора среды, который давит.
То есть – Что вы хотите?
Основных вариантов всего два:
- Уйти из-под его действия.
- Оказать своё воздействие на среду таким образом, чтобы этот фактор перестал оказывать на вас негативное воздействие, которое вы воспринимаете как дискомфорт.
После выбора варианта необходимо информацию, относящую к процессам управления разделить на три модуля.
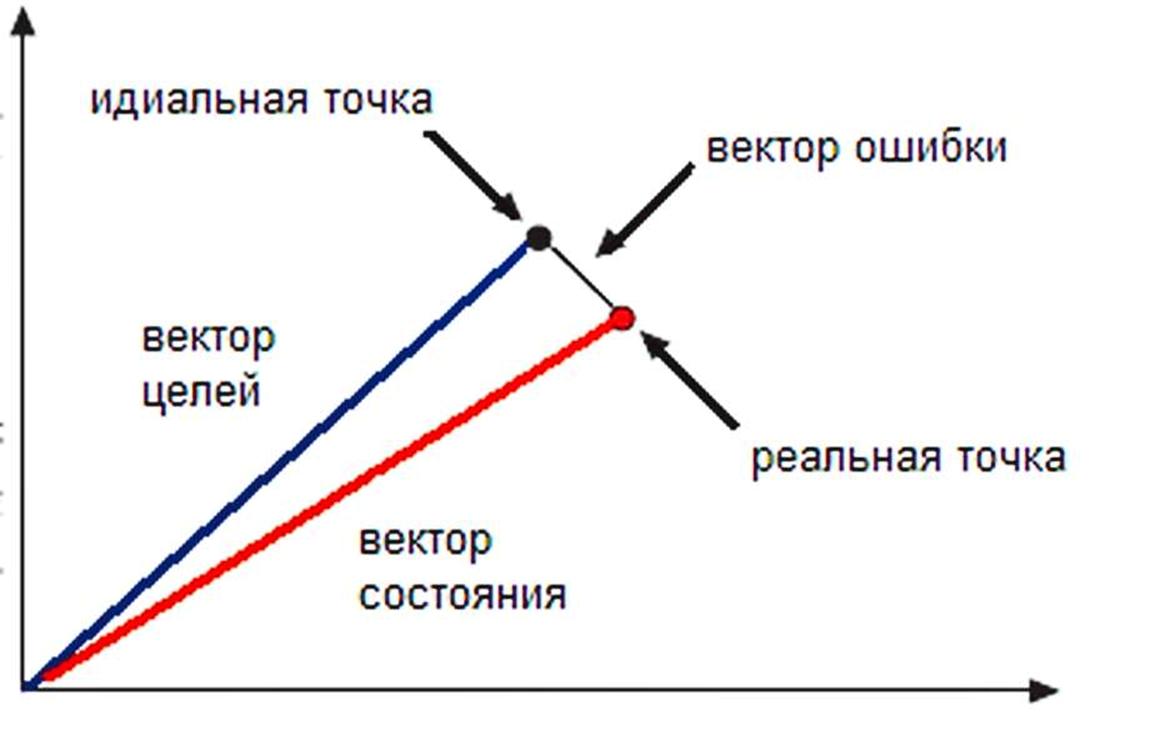
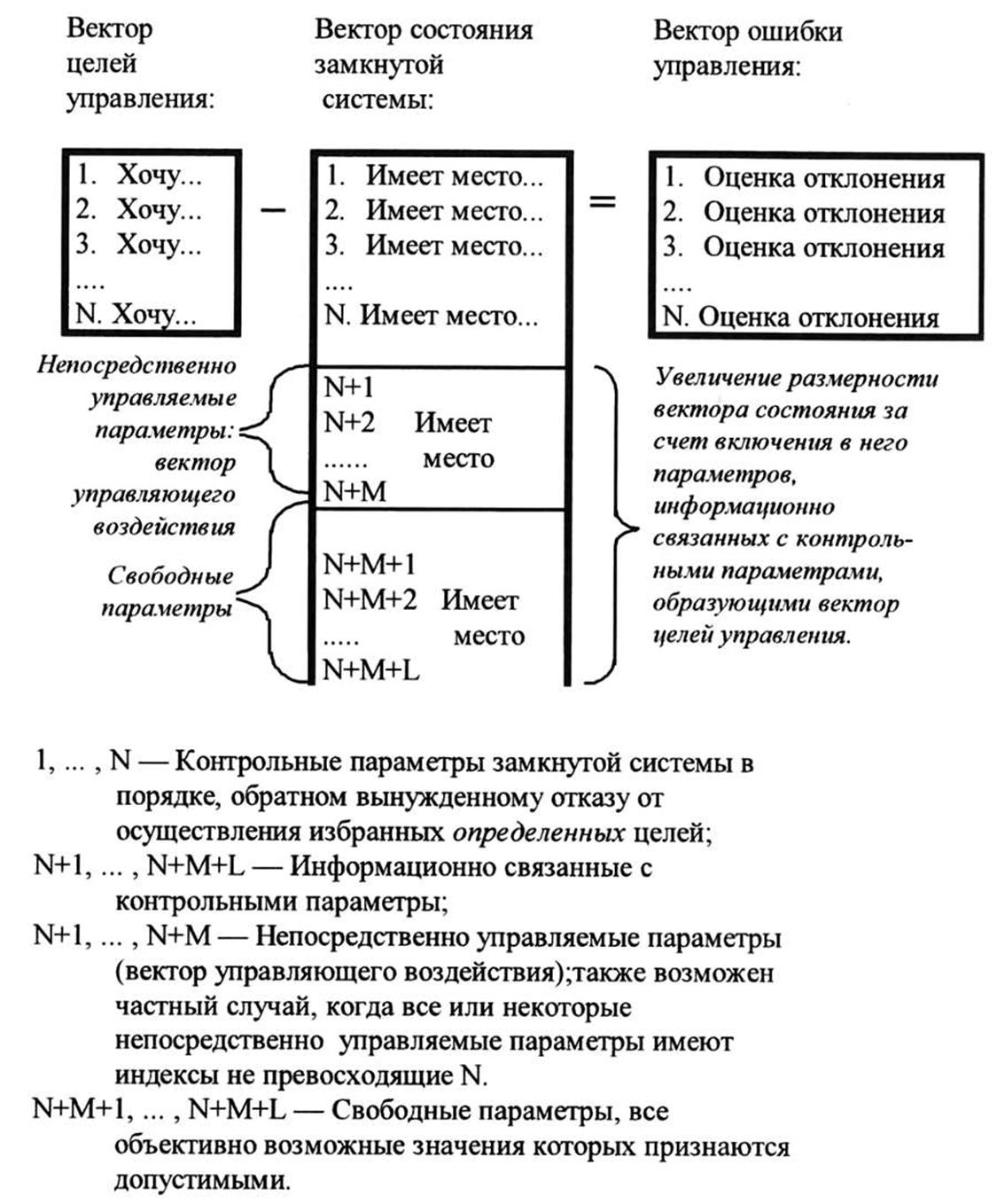
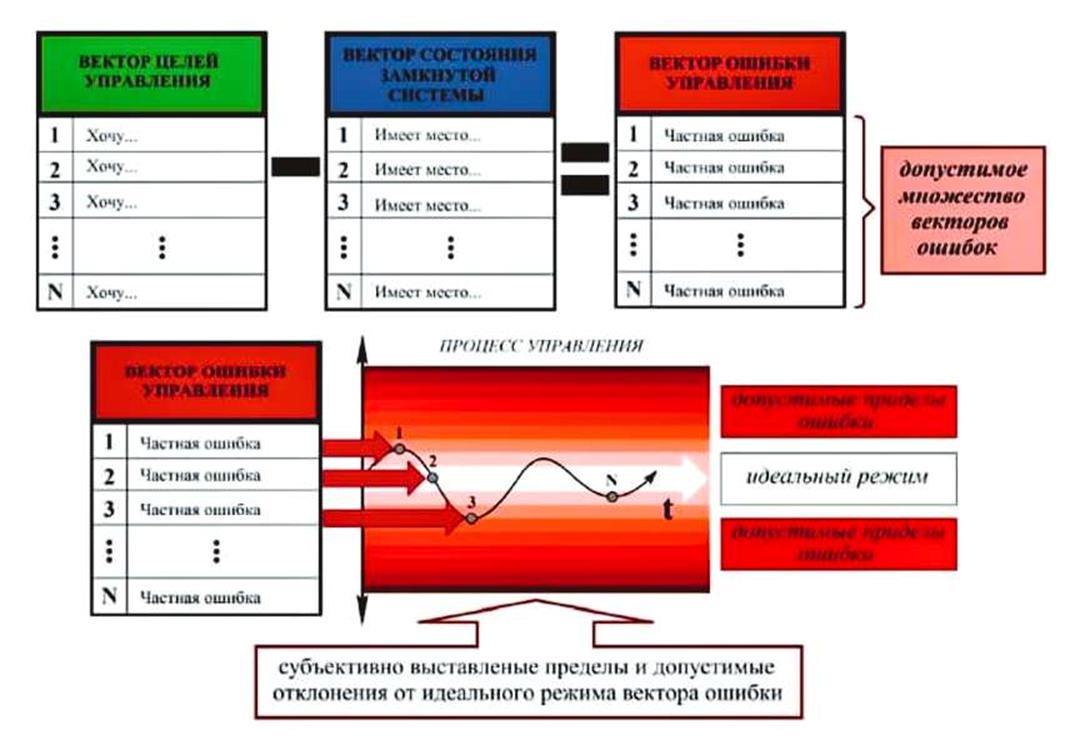
- Модуль первый. Вектор целей управления, – содержит в себе все цели управления. Вектор целей управления образует иерархию целей, упорядоченную в порядке, обратном последовательности вынужденного отказа от каждой из целей. Т. е. на первом месте стоит самая главная по значимости цель. На последнем месте стоит та цель, от которой можно отказаться первой при условии, что вся совокупность целей не может быть реализована. Вектор целей управления характеризует тот идеал, который должен быть, достигнут в результате управления.
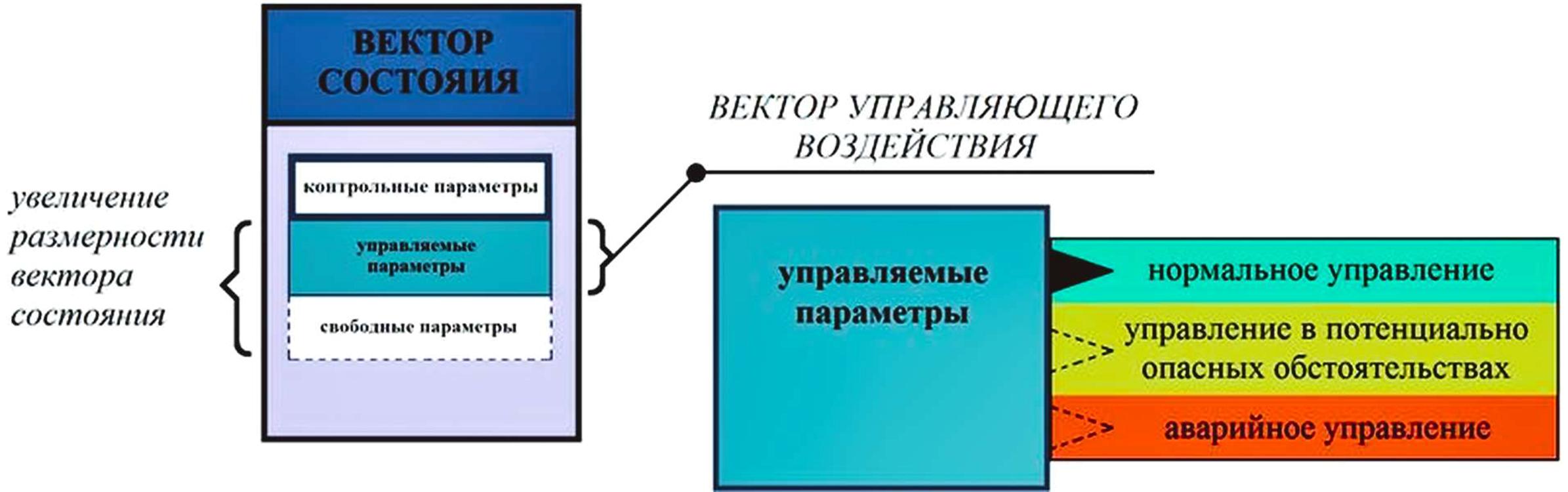
- Модуль второй. По большому счёту реальность отличается от идеала. И в нашем случае реальность описывается вектором текущего состояния. Иерархия вектора текущего состояния повторяет иерархию параметров в векторе целей управления, но понимаете, если бы мы на любой объект могли воздействовать непосредственно, то нам не было бы надобности городить огород с Достаточно Общей Теории Управления и её приложениями. В большинстве случаев мы не можем непосредственно воздействовать на то, что входит в вектор целей управления. И именно из этого обстоятельства проистекает надобность в Достаточно Общей Теории Управления и надобность в навыках приложения её к решению практических задач в жизни. Поэтому вектор текущего состояния имеет размерность большую, чем имеет вектор целей. Увеличение размерности вектора состояния происходит за счёт включения в него дополнительных параметров, которые по жизни связаны с параметрами, повторяющими структуру вектора целей объективными закономерностями бытия. Вот эти дополнительные параметры, которые входят в вектор текущего состояния можно разделить на две группы. Первая группа – это те параметры, на которые мы можем воздействовать непосредственно. И, изменение которых влечёт предсказуемое для нас изменение параметров, которые повторяют набор параметров вектора целей. Вот эти параметры, на которые мы можем воздействовать непосредственно, и изменение которых влекут за собой желательные для нас изменения параметров, входящих в вектор целей, – они образуют вектор управляющего воздействия. Это составная часть вектора текущего состояния. Кроме этого, в вектор текущего состояния входят свободные параметры – это Вторая группа. Свободные параметры характеризуются тем, что любые их значения в процессе управления признаются допустимыми. Они могут тоже изменяться в процессе управления. Но поскольку они не входят в вектор целей управления, они для нас, в большинстве, случаев не интересны. Но, в ряде случаев, процессы управления могут быть такими, что некоторые свободные параметры могут переходить в параметры вектора целей управления. Ну, какие случаи? Ну, например, высота полёта самолёта может быть свободным параметром в каких-то условиях, но если вам предстоит пересечь горный хребет, то вы должны озаботиться тем, чтобы высота полёта была не ниже, чем вершина этого горного хребта. И, соответственно, ранее свободный параметр перестаёт быть свободным и входит в вектор целей управления.
- Модуль третий. После того, как вы имеете пару векторов:
вектор целей управления, вектор текущего состояния, вы можете построить их
разность.
 Разность, в самом широком понимании термина разности, как
просто разница. Если вектор целей в самом общем смысле можно описать как
перечень: «Хочу…, Хочу…, Хочу…», упорядоченный по значимости, то вектор
текущего состояния описывается в терминах: «Имеет место быть…, Имеет место
быть…, Имеет место быть…». Ну, а вектор ошибки управления, будучи
разницей, разностью вектора целей управления и вектора текущего состояния,
описывается в терминах неудовлетворённости: «Не удовлетворён этим…, Не
удовлетворён этим…, Не удовлетворён тем-то…». Но, понимаете, если мы
рассматриваем ситуации, когда одним объектом управления намериваются или
претендуют на управление разные субъекты, то может возникнуть ситуация,
когда вектор целей одного другим воспринимается как ошибка управления. А
то, что первым воспринимается как ошибка управления, на самом деле
является вектором целей другого. И поэтому то, что с точки зрения первого
– это катастрофа управления, с точки зрения второго – это достижение
поставленных им целей управления. Т. е. вот эта формула – вектор целей
минус вектор состояния равен вектору ошибки – она, как всякая
алгебраическая формула, допускает перенос элементов из правой части
равенства в левую часть равенства и наоборот. К примеру, развал СССР, для
некой советской элиты это была цель управления, а для другой части элиты
ошибка в управлении.
Разность, в самом широком понимании термина разности, как
просто разница. Если вектор целей в самом общем смысле можно описать как
перечень: «Хочу…, Хочу…, Хочу…», упорядоченный по значимости, то вектор
текущего состояния описывается в терминах: «Имеет место быть…, Имеет место
быть…, Имеет место быть…». Ну, а вектор ошибки управления, будучи
разницей, разностью вектора целей управления и вектора текущего состояния,
описывается в терминах неудовлетворённости: «Не удовлетворён этим…, Не
удовлетворён этим…, Не удовлетворён тем-то…». Но, понимаете, если мы
рассматриваем ситуации, когда одним объектом управления намериваются или
претендуют на управление разные субъекты, то может возникнуть ситуация,
когда вектор целей одного другим воспринимается как ошибка управления. А
то, что первым воспринимается как ошибка управления, на самом деле
является вектором целей другого. И поэтому то, что с точки зрения первого
– это катастрофа управления, с точки зрения второго – это достижение
поставленных им целей управления. Т. е. вот эта формула – вектор целей
минус вектор состояния равен вектору ошибки – она, как всякая
алгебраическая формула, допускает перенос элементов из правой части
равенства в левую часть равенства и наоборот. К примеру, развал СССР, для
некой советской элиты это была цель управления, а для другой части элиты
ошибка в управлении.
См. ролик./193_Величайшее предательство кукурузного иуды Хрущёва/.
Поэтому, когда мы говорим о процессах управления, то всегда надо это иметь в виду и понимать, кто на какие цели работает. Кто, на какие цели декларирует работу, а работает, на самом деле, на другие цели. И это очень многое упростит в жизни.
При формировании вектора целей управления на первом приоритете должна стоять цель пребывания в среде с некоторым запасом устойчивости на случай возрастания давления среды, потому что если этого запаса устойчивости нет, то это уже фактически режим выживания, который не обязательно будет успешен.
В биологических видах вот это всё обстоятельство зафиксировано в фундаментальной части информационного обеспечения особей и выражается в их поведении как страх и инстинкт самосохранения, но также некоторые и другие инстинктивные программы, связанные с обеспечением выживаемости биологического вида. То есть, при любом раскладе не стоит забывать, что жизнь людей это самое главное.
Поэтому, нам для достаточно успешного управления любым процессом необходимо всегда, прежде чем что-либо планировать и тем более реализовывать, просчитать все варианты в аспекте запаса устойчивости в комплексе всех взаимовложенных суперсистем. Надо как бы предвидеть, а хватит ли ресурсов для реализации целей не только после внесенных изменений именно в той среде, где мы находимся или предполагаем вскоре находиться. Но и иметь в виду, что в нашей суперсистемы, должен остаться некий запас устойчивости, на случай если вдруг из внешней среды будут дополнительные воздействия. Для этого также следуют использовать, в том числе и собственное чувство Меры, Различения, Совести и так сказать некой интуиции.
По сути, наша задача заключается в том, чтобы для выявленного фактора среды сформировать главное целеполагание относительно его, если говорить простым языком, то, что мы хотим сделать в этом направлении.
То есть, если воняет с ног, то наша цель исключить плохой запах.
После этого, эту цель необходимо проверить на предмет адекватности.
Для этого прогоняем её по нашим начальным параметрам:
- Можно.
- Должно.
- Вредно.
Если наш вопрос серьёзный и жизненно важный, то нашу цель необходимо проверить в более широком аспекте относительно всех шести объективных основных закономерностей.

Далее необходимо эту цель вписать в свой личный вектор целей таким образом, чтобы она не конфликтовала с другими, уже существующими векторами цели по вашей жизни.
После чего необходимо нашу цель проработать на подцели.
По сути, надо найти те цели, которые помогут добиться главной цели.
К примеру, имеем фактор среды – воняет от ног.
Главная цель – Исключить посторонний запах
Подцели:
- Мыть ноги.
- Стирать носки.
- Мыть обувь.
- Сменить питание.
Приведенный выше пример не полностью раскрывает смысл вектора целей в том ракурсе, что у нашего вектора должны быть не просто подцели, а цели, как бы другого уровня, другой значимости, выстроенной в определенную иерархию.
То есть, к примеру, нам надо доехать до Хабаровска. Чтобы это осуществить мы должны выполнить ряд действий, которые должны идти строго друг за другом. Подготовить деньги, выбрать маршрут, выбрать транспорт, купить билет, собрать необходимые вещи … и так далее.
И если мы перепутаем очередность этапов, то срыв управления неминуем.
Повторим ещё раз, Вектор целей, – это иерархия целей. На первом месте стоит самый значимый, на последнем месте в иерархии целей стоит то, от чего мы можем отказаться первым, т. е. иерархия вектора целей управления, – она обратна порядку значимости целей для нас.
К тому же, вы должны обеспечить целеполагание таким образом, чтобы на всех этапах и особенно цели завершающего этапа вашего частного процесса, принадлежали объемлющему процессу ВВИ, который обладает приемлемыми для вас характеристиками. Если вы не в состоянии обеспечить приемлемость этих характеристик, то, достигнув целей, вы столкнётесь с разного рода либо сопутствующими эффектами, либо обнулением для вас значимости уже достигнутых целей.
Ну, самый частый пример, который приводится на эту тему – это цель третьего этапа – не опоздать на Титаник. То есть на тот корабль Титаник, который уходит в свой первый рейс, который станет его последним. Вот здесь вам и необходимо будет ваше чувство различения, интуиция и связь с ВВИ, о чём шла речь ранее в предыдущих разделах курса.
После всего сказанного вам необходимо разобраться с нижеуказанной таблицей исходя из вышеописанных модулей.
Если полноценно невозможно заполнить таблицу, значит, задача управления не может быть даже поставлена, не говоря уже о разрешении возникшей проблемы. Задача управления в своём существе — достичь целей, а равно — обнулить вектор ошибки управления.
По сути, на начальном этапе, пока мы не предприняли никаких действий, то вектор ошибки как оценка отклонения будет наибольшим и именно эти значения необходимо и отметить в таблице.
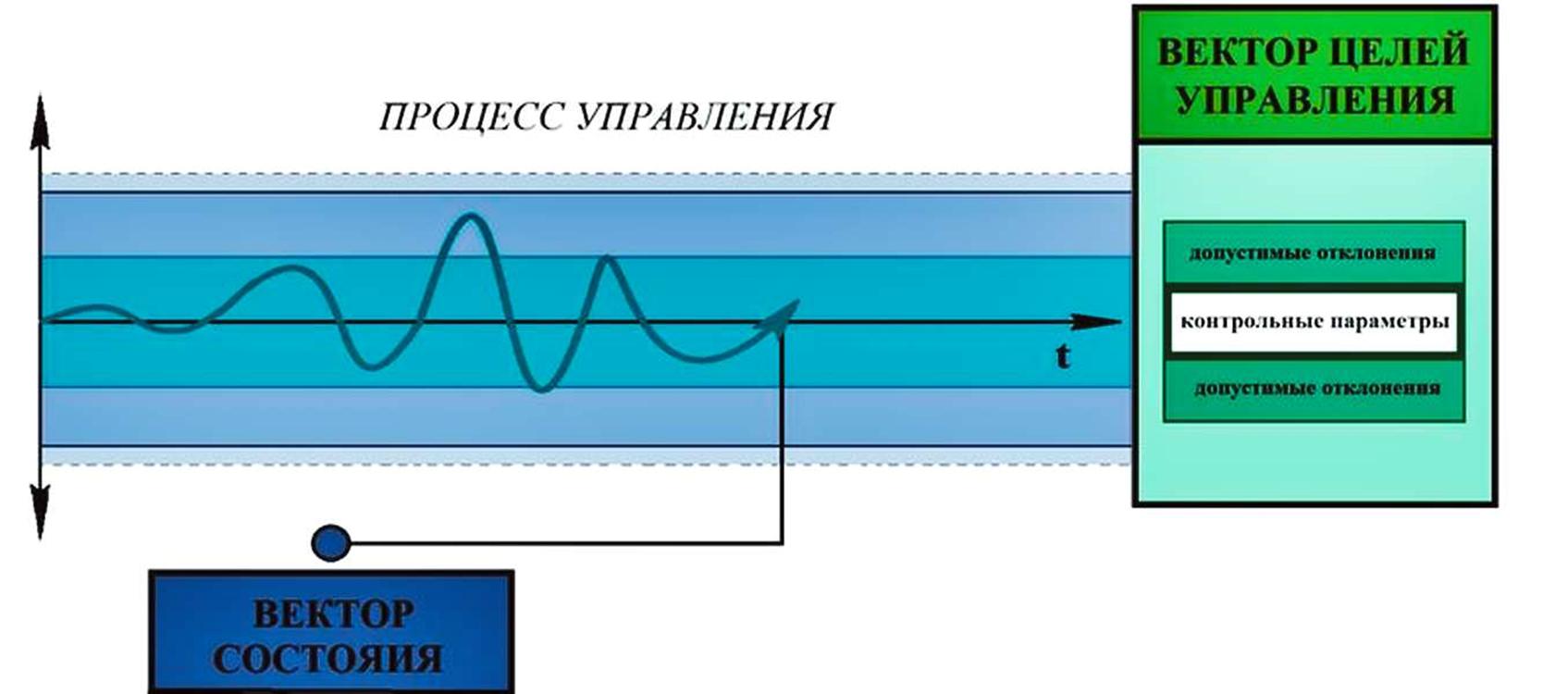
Для вектора целей управления вы должны также выбрать начальные
- Контрольные параметры.
- Допустимы отклонения.
Где контрольные параметры — это параметры, за которыми необходимо следить, к примеру, скорость машины, курс машины, пройденный путь и так далее.
А допустимые отклонения — это предельные мерные значения контрольных параметров, за которые нельзя выходить, иначе срыв управления неизбежен
Для вектора состояния вы должны выбрать имеющиеся именно сейчас Контрольные Параметры, в которые входят:
- Управляемые параметры.
- Свободные параметры.
Где Управляемые параметры — это параметры, изменяя которые мы меняем параметры вектора целей, по сути это параметры через которые мы достигаем желаемое.
По большому счёту это параметры вектора управляющего воздействия.
Так, к примеру, для нашего вектора целей достичь на машине город Хабаровск, имеем подцели, проехать 400 км. доехать за 6 часов, держать в среднем скорость не более 90 км/ч.
Значит, грубо говоря, управляемые параметры будут:
- Направление – некая траектория и соответствующая дорога и как результат некий режим работы рулевым колесом, который был до этого и имеет быть сейчас.
- Характер движения как некий скоростной режим, который необходимо было выдержать, дабы уложиться в вектор целей, который был до сих пор и имеет быть сейчас. И ради которого надо определенным образом воздействовать на педали газа и тормоза.
При этом, управляемые параметры необходимо контролировать на всём протяжении управления. Дабы не скатиться в режим опасного или аварийного управления или вообще к срыву управления (катастрофа), к примеру, скорость машины, курс машины, пройденный путь и так далее, но уже именно сейчас, то есть, то, что мы имеем в точки контроля.
В нашем случае, место нахождения на момент контроля это и есть контрольные и критические параметры характера достигнутого движения (пройдены путь, средняя скорость, время в пути).
Свободные параметры это те, которые изменяются при изменении непосредственно управляемых, но не входят в перечень контрольных параметров, выбранных при формировании вектора целей.
К примеру, состояние тормозных колодок в машине, износ покрышек.
Вопрос правильного выбора управляемых параметров и свободных параметров очень важный вопрос. Так как, если мы не включим, к примеру, в список контрольных параметров количество бензина. То может случиться вариант его завершения в самый неожиданный момент, благодаря чему мы получим либо срыв управления, если окажемся в одиночестве зимой на трасе, либо впадём в режим аварийного управления, и нам придётся менять приоритет векторов цели и добавлять ещё одну подцель.
Для вектора ошибки вы должны уметь оценивать результат сравнения вектора целей и вектора состояния как минимум в трёх режимах:
* Нормальное качественное управление — в нём реально ненулевые значения компонент вектора ошибки управления оцениваются как вполне приемлемые (они могут при этом находиться в пределах погрешности измерений — в этом случае достигаются значения так называемого «технического нуля» либо могут считаться приближённо равными нулю).
* Допустимое управление — в нём реально ненулевые значения компонент вектора ошибки находятся в пределах, признаваемых допустимыми, но допустимое управление по своим характеристикам хуже, чем нормальное.
* Аварийное управление — в нём те или иные компоненты вектора ошибки выходят за допустимые пределы, но катастрофа управления (необратимая потеря управления, повреждения, разрушение объекта управления или нанесение им ущерба элементам внешней среды) ещё не наступила. В режиме аварийного управления главной целью управления становится возвращение объекта хотя бы в режим допустимого управления.
При этом именно во время аварийного управления можно, а иногда и должно, выходить на уровень вектора целей, и в оперативном порядке либо менять его иерархию, либо добавлять некий компонент, дабы не свершился срыв управления. В режимах нормального управления и допустимого, в этом направлении даже и думать нельзя, всё решается через управляемые параметры.
Повторим ещё раз – Вектор ошибки управления представляет собой “разность” (в кавычках потому, что разность не обязательно привычная алгебраическая): «вектор целей» — «вектор состояния».
Он описывает отклонение реального процесса от предписанного вектором целей идеального режима и также несёт в себе некоторую неопределённость, унаследованную им от вектора состояния (шумы измерительных приборов, субъективность индивидов и так далее).
Образно говоря, вектор ошибки управления это — перечень неудовлетворённых желаний соответственно перечню вектора целей с какими-то оценками степени неудовлетворённости каждого из них;
- оценками либо соизмеримых друг с другом числено уровней,
- либо числено несоизмеримых уровней, но упорядоченных ступенчато дискретными целочисленными индексами предпочтительности каждого из уровней в сопоставлении его со всеми прочими уровнями.
Вектор ошибки — основа для формирования оценки качества управления субъектом-управленцем. Оценка качества управления не является самостоятельной категорией, поскольку на основе одного и того же вектора ошибки возможно построение множества оценок качества управления, далеко не всегда взаимозаменяемых.
По сути, целеполагание создаёт вопрос – как достичь целей?
Вопрос о том, как достичь целей – это вот как раз и есть тот вопрос, который порождает Достаточно Общую Теорию Управления.
Суть в том. что если нам хочется чего-то, и мы можем непосредственно воздействовать на это, то нет надобности и говорить о теории управления.
Но в большинстве случаев то, чего мы хотим, – оно не осуществимо прямо так сразу, мгновенно или очень быстро. И оно может быть не осуществимо путём непосредственного воздействия на объект наших вожделений и желаний, целеустремлённости.
Но для того, чтобы реализовать избранную нами цель, избранный нами вектор целей, нам может потребоваться воздействие на что-то другое, на что мы можем непосредственно воздействовать, либо что нам необходимо создать для того, чтобы на него воздействовать. И вот непосредственное воздействие на это что-то, – оно повлечёт в жизни такие изменения, которые приведут к достижению избранных нами целей. Поэтому вопрос о целеполагании, – он приводит к вопросу о построении концепции достижения целей. Но это уже следующий этап.
На данном этапе нам также стоит обратить внимание на то, что любые наши действия сказываются на окружающей среде. Если говорить грубо, то надо в самом начале попытаться отследить и выявить возможных потенциальных врагов и возможных противников.
К примеру, начать производить новые и хорошие карандаши по более низким ценам – для себя и людей это хорошо, для конкурентов это плохо. Следовательно, имеем конфликт целей, так как всё, что плохо для конкурентов для вас может быть приближение к вашей цели и наоборот. Следовательно, некие удачные действия конкурентов для вас будут увеличивать ваш вектор ошибки. Так, к примеру, продажи ваших карандашей будут падать, если ваши конкуренты добьются новых надуманных стандартов, по которым ваши карандаши будут проигрывать, и поэтому их не будет закупать государство.
Надо выявить такие тенденции, и если они возможны, то надо их проработать и вписать их в контрольные объекты и просчитать для них контрольные параметры.
Здесь сразу стоит обратить внимание на то, что для полноценного анализа всех входящих данных необходим навык работы со статистикой, следовательно, надо уметь пользоваться инструментами теории вероятности и математического анализа. Так что, если к этому вопросу вы отнеслись ранее не очень внимательно, то в обязательном порядке вернитесь к проработке текста в главе /7. 2. 3. Статистика и вероятность/ и отработайте хотя бы начальные навыки.
Потому, что если вы не правильно определите начальные параметры своего состояния, то всё последующее управление будет не состоятельным. К примеру, не зная метрологически точно какой уровень знаний учеников после экзаменов именно как функцию распределения случайно величины и её главные параметры, не возможно точно оценить начальные данные, к примеру, фактора среды – снижение успеваемости, а, следовательно, невозможно и начать любое полноценное управление.
Небольшое дополнение.
Главное правило при начале любой человеческой деятельности это постановка и решение особого вопроса. Вопроса – как устранить транзакционные издержки именно в том предмете и вокруг него, которые могут возникнуть на пути его изменения.
То есть, когда вы хотите что-либо осуществить, изменяя его и преобразовывая, исходя из поставленной цели.
По сути, как только вы установили структуру и динамику всевозможных изменений и взаимосвязей, у вас сразу возникнет некое техническое задание (тех. задание) именно на инструментарий, через который можно будет ухватить выявленные издержки. Описать их, предвидеть их, и конечно минимизировать. И самое главное включить их в общую схему.
Тем самым, вы можете скорректировать создаваемый вектор целей и вектор целей вообще по жизни.
См. практики в соответствующих пунктах документа главы:
/7. 4. 5. ПФУ 3 целеполагание/
См. дополнительные пояснения.
Словарь:
/10. 19. 9. Транзакция и транзакционные издержки/
Литература:
/705_Вектора целей и состояния и ошибки/
Видео:
/7183_Вектора и целей и состояний и ошибки/
/7182_Вектора и целей и состояний и ошибки 2/
Следующая страница ➤

Данилёнок Вадим Евгеньевич
С этого места Вы можете бесплатно скачать книгу по материалам сайта и выразить благодарность автору по указанной ссылке
СКАЧАТЬ КНИГУ БЕСПЛАТНО
или нажав на верхнюю картинку
* * * * * * * * *