7. 3. 4. Формирование концепции
Выработка и формирование концепции достижения намеченных целей на основе некого прогноза.
После того как вы определились с целями и, определились с тем, чего вы хотите, возникает вопрос,
– А как достичь целей?
Как достичь целей – это вопрос особой важности.
Ответ на него даёт концепция управления, т. е. та последовательность действий, в результате которых цель должна стать реальностью.
Концепция управления – это описание как некая модель процесса обнуления, вектора ошибки управления.
Формирования той или иной концепции управления – это всегда конкретика, конкретика той предметной области, к которой принадлежит частный процесс управления, и конкретика взаимодействия этого частного процесса управления с окружающей средой. И конечно это конкретика, выражающаяся в реализации целей, которые должны быть устойчивы и должны сохранять свою привлекательность на момент их достижения.
Начальный вопрос при построении концепции управления любого частного процесса – это вопрос о том, «Есть ли место этому процессу в русле Промысла?»
Если есть место, то да, – вы имеете право заниматься этим управлением, если нет места, то – нет. Тогда вы должны остановить свои творческие усилия и переориентировать их на что-то другое. И не надо на счёт этого расстраиваться, так как лучше это сделать сразу, чем потом разочаровываться и пожинать горькие плоды. В вашем личном опыте наблюдения за жизнью и вообще в истории есть множество подобных примеров такого рода. Были случаи в прошлом, когда некоторые учёные уничтожали своё письменное наследие, исходя из того, что они понимали, что нравственно-этически, человечество не доросло до того, чтобы пользоваться этими результатами.
Но известны и другие случаи, когда люди занимались самоутверждением и трагическое стечение обстоятельств, в конечном итоге, пресекало их усилия.
Поэтому формирование концепции – это всегда познавательно-творческий и нравственно определенный процесс.
Если говорить о том, что происходит в процессе формирования концепции, то, прежде всего, вы опираетесь на то мировоззрение, которое у вас уже сложилось к этому моменту. Мировоззрение может быть нескольких типов. Главная задача мировоззрения – это моделирование течения событий в жизни в темпе, упреждающем, опережающем реальное течение событий. Моделирование – многовариантно; поскольку оно протекает опережающими темпами, – оно позволяет вам из многих вариантов выбрать один или несколько взаимно-вложенных вариантов, которые вы положите в основу концепции управления. И здесь встаёт вопрос именно о том, какое из мировоззрений лучше справляется с задачей моделирования.
Если вы очень усердно проходили прилагаемый курс, то, скорее всего Ваше мировоззрение уже имеет основу триединства МИМ, оно ушло от давления «Я-центризм» и калейдоскопа, следовательно, вы уже сможете на адекватной основе сформировать концепцию управления любого необходимого процесса.
В предыдущей главе: /7. 3. 3. Целеполагание/, мы выбирали главную цель и подцели, реализация которых позволит нам решить вопрос на счёт фактора среды, который на нас давит.
Так вот, общая концепция управления складывается из концепций управлений всех подцелей. То есть, нам необходимо для всех выбранных подцелей сформировать пути их достижения, после чего всё обобщить, расположить всё в виде работоспособной иерархии относительно меры времени, либо других мер и получить, так сказать, генеральную концепцию управления.
Для реализации всего этого, изначально необходимо отработать несколько обязательных этапов, на основе которых впоследствии и будет сформирована Концепция Управления.
1. Определение Устойчивости в Смысле Предсказуемости.
Если говорить полным образом, то имеем длинный термин – Устойчивости объекта управления в смысле предсказуемости его поведения в определённой мере под воздействием внешней среды, внутренних изменений и собственно управления.
Кратко – это Устойчивость по Предсказуемости.
Проистекает этот термин из того обстоятельства, что если вы не в состоянии предсказать развитие ситуации с достаточной для вас точностью, то вы не можете организовать управление в принципе.
К примеру, шофёр способен управлять автомобилем вследствие того, что заранее знает, предвидит, предощущает, как и в течение какого интервала времени, машина отреагирует на его предумышленные манипуляции с органами управления.
Если вы не умеете водить машину или она внезапно серьёзно разрегулировалась, то её реакция на ваши действия непредсказуема для вас и в этом случае, для вас автомобиль — неуправляем.
Поэтому если вы можете предсказать развитие ситуации, то вы в принципе можете войти в неё как управленец и привести ситуацию к тем целям, которые вы перед собой поставили.
При этом, понятие устойчивости объектов в смысле предсказуемости поведения – это более широкое понятие. Чем понятие устойчивости в том виде, в каком оно принято в большинстве видов техники и в том виде как его понимают большинство людей житейски.
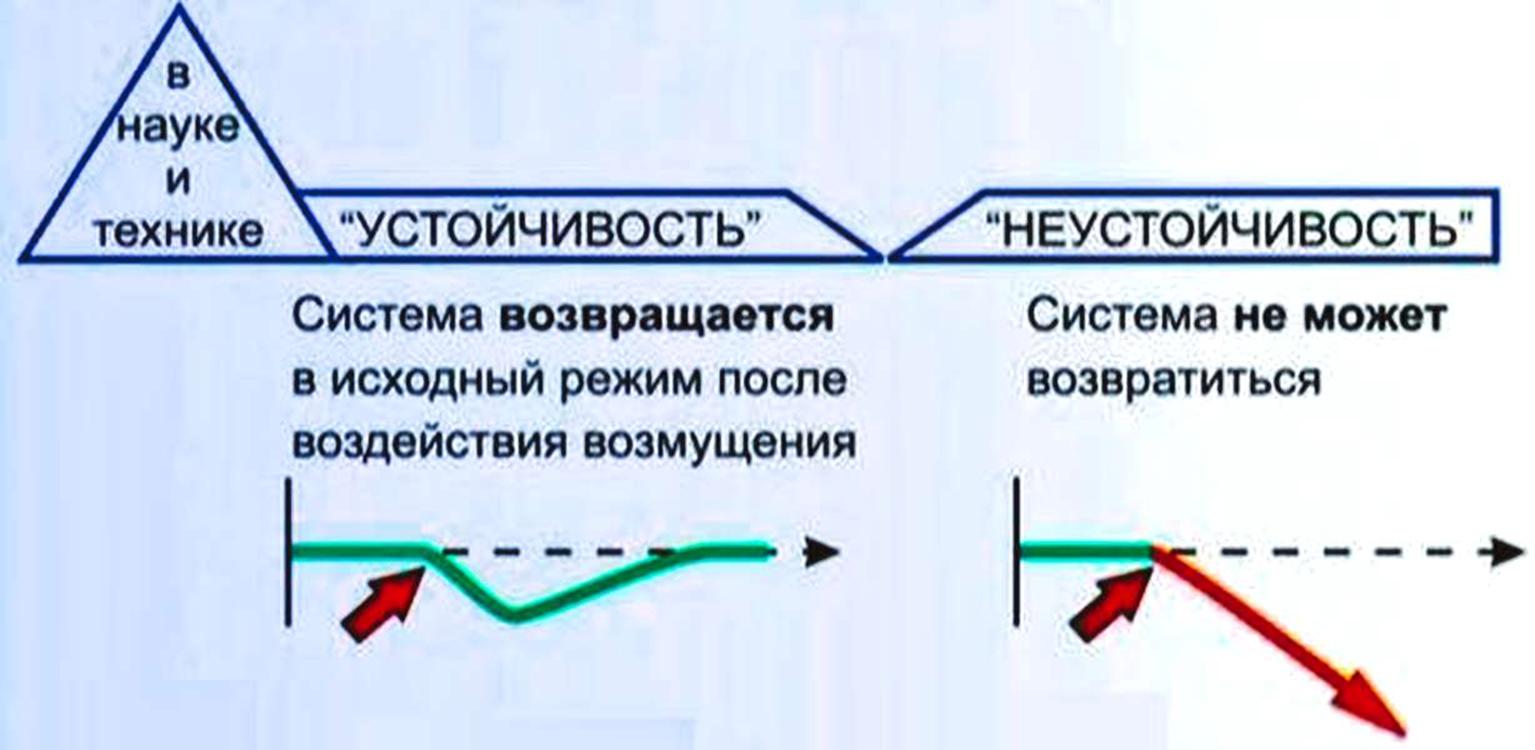
Потому что, если что-то неустойчиво в обычном понимании термина устойчивость, но вы можете предсказать его поведение, вы можете, в принципе, организовать процесс управления этим неустойчивым объектом и процесс управления будет достаточно устойчив для того, чтобы вы могли достичь целей.
Вот это обстоятельство и делает понятие устойчивость в смысле предсказуемости поведения более широким понятием устойчивости, чем общепринятые понятия устойчивости в математике, в теоретической механике, в электротехнике, в электронике и в других процессах.
К чему это ведёт?
Мы очень часто сталкиваемся с рецептами решения задач, в том числе и управленческих задач. Но когда мы пытаемся применить эти рецепты к решению наших задач, мы не всегда задумываемся о том, в каких условиях эти рецепты были получены и доказали свою работоспособность.
Вот если мы имеем представление об устойчивости объекта управления в смысле предсказуемости, то мы можем задаться вопросом о том, а соответствует ли рецепт решения задачи тем условиям, в которых мы находимся, и в которых мы пытаемся решать эту задачу. И мы можем получить ответ, что рецепт этим условиям не соответствует.
Если мы получили такой ответ, то мы должны выработать некий иной рецепт решения задачи, либо признать свою несостоятельность в качестве управленца по отношению к этой задаче. И в этом случае мы воздерживаемся от решения этой задачи. Но если мы не можем оценить эти условия исходя из понятия об устойчивости объекта управления в смысле предсказуемости поведения, то мы можем применять рецепт в ситуациях, в которых он заведомо не работоспособен.
Эта его неработоспособность может выражаться в разной мере, т. е. мы получим результат не столь качественный, как нам хотелось.
А может выражаться и в том, что мы не получим результат ожидаемый, но мы получим какую-то катастрофу, которая для нас может оказаться и убийственной, и не только для нас, но и для окружающих. Поэтому понятие об устойчивости в смысле предсказуемости – оно очень важно. Потому, что если оно есть, и вы можете решить задачу об устойчивости в смысле предсказуемости поведения объекта, то вы можете построить и концепцию управления объектом самостоятельно. Следовательно, вы можете чётко разграничить те области, где этот рецепт решения задач применим, и те области, в которых этот рецепт решения задач либо не применим в принципе, либо применим с меньшим качеством, чем вам того хотелось бы.
Понятие об устойчивости в смысле предсказуемости – это особая специфика Достаточно Общей Теории Управления. В других теориях управления это понятие либо отсутствует полностью, либо задача об устойчивости в смысле предсказуемости поведения решается в некотором неявном, опосредованном виде, но так или иначе, она должна быть решена для того, чтобы возникла концепция управления.
Если говорить грубо, то всё сводится к тому, чтобы развитое чувство Меры и Различения совместно с научными знаниями, к примеру, теории вероятности со статистическими данными и совсем имеющимся опытом, позволили бы построить нам некую модель процессов поведения нашего объекта. Далее, работая с этой моделью в темпе, опережающем реальное течение событий, вы уже сможете, как бы предвидеть будущее поведение объекта. В дальнейшем, модифицируя объект или связанные с ним другие объекты, вы в конечно счёте, получите возможность добиться от него приемлемых для вас эксплутационных характеристик.
При этом необходимо всегда помнить, что задача об устойчивости поведения объекта управления в смысле предсказуемости его поведения всегда решается двояко.
- Первое и главное – это чувство Меры как чувство интуиции.
- Второе и вспомогательное – это наука.
Надо понимать, что наука не должна однозначно главенствовать над чувством Меры. Наука в том виде, в каком она существует, – это своего рода осмысление всего, что было интуитивно увидено разными исследователями на протяжении всей истории человечества, когда в нём существует наука. Поэтому, когда мы пытаемся решать управленческие задачи исключительно на основе научных методов предвидения тех или иных последствий, мы можем потерять какие-то особенности, которые не вписываются в те модели, которые предлагает нам наука. Именно развитое и осознаваемое чувство Меры как некий обобщенный подсказчик от вселенской Меры, является основной опорой при принятии любого управленческого решения, а вот все научные методы должны именно подтвердить и обосновать то первое, что способствовало приходу от чувства Меры как от чувства интуиции.
Поэтому все, что мы проходили в предыдущих разделах работы с подсознанием, именно сейчас необходимо применять в полной мере.
На начальном этапе мы уже определяли необходимую степень возможного воздействия и возможной управляемости фактора среды, который давит и степень предсказуемости его поведения как такового. То есть, мы определялись, на тот счет, что выявленный нами фактор среды, управляем ли он вообще и можно ли, хоть как-то предсказать его изменения, от возможных воздействий на него и вообще его любые изменения. Именно ответив на эти вопросы, мы делали начальные прогнозы:
- Либо нам пытаться управлять, воздействуя на сам фактор среды, выявляя способы воздействия (нападать).
- Либо организовывать защиту от вредных всевозможных воздействий и приспособиться к фактору среды (защита)
- Либо остановить любые действия и банально игнорировать фактор среды, но, не забывая получать дополнительную информацию (замереть и ждать).
По сути, это самый первый этап определения устойчивости в смысле предсказуемости.
Мы как бы предполагаем, как может устойчиво развиваться весь процесс, в будущем исходя из трёх основных направлений.
- Мы воздействуем некими способами на проблему, и предположительно будет желаемая ответная реакция.
- Мы защищаемся от проблемы и от её следствий, и предположительно будет достигнут желаемый результат.
- Мы ничего не делаем, следим за ситуацией, и предположительно будет то, что мы ожидаем.
Если мы, не в состоянии, прогнав по этим пунктам фактор среды, который на нас давит, выявить, что будет в будущем, не можем предсказать поведение окружающей среды, которая связана с этим фактором. То это всё означит, что мы не в состоянии определиться с необходимым поведением в смысле устойчивости по предсказуемости.
Мы банально не сможем полноценно управлять.
Поэтому выбор способа поведения, выбор модели будущих наших действий прямым образом зависит от определения устойчивости по предсказуемости теми объектами, с которыми мы решили взаимодействовать или даже просто наблюдать.
Следовательно, нам необходимо выбрать все предполагаемые объекты и оценить их поведение по степени устойчивости в смысле предсказуемости.
Если вы водитель машины, то вы должны знать, как ваша машина будет в будущем отвечать в разных условиях на ваши действия или бездействия.
То есть, вы должны оценить уровень её исправности, её ресурс, что может с ней случиться, если вы, к примеру, два года вообще её не увидите, или как она может вас защитить или наоборот причинить вам вред.
Устойчивость в смысле предсказуемости всегда располагает возможностью сделать некий прогноз о предсказуемом поведении объекта.
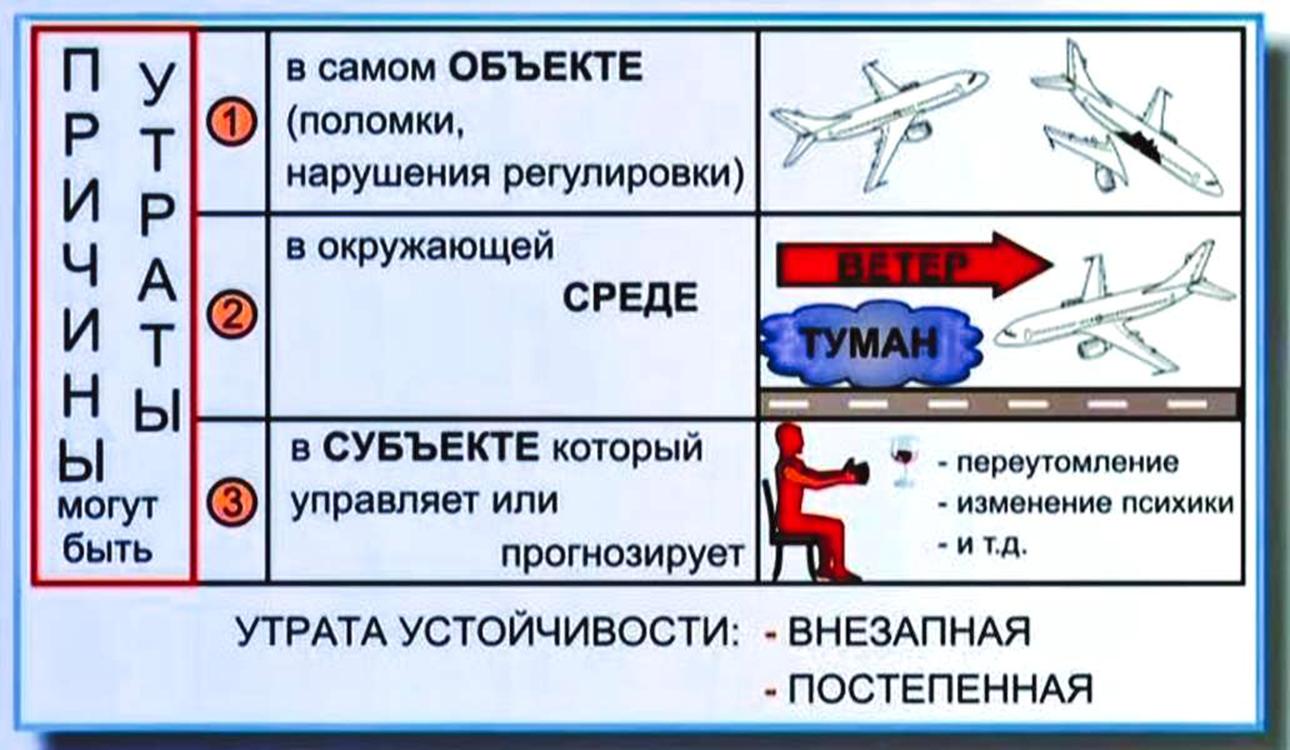
Утрата устойчивости возможна по нескольким причинам, знание этих причин заранее помогает впоследствии не выходить за рамки разумного управления.
Для хорошего понимания рассматриваемого вопроса необходимо иметь полноценный образ слова «устойчивость», так что читаем небольшой дополнительный материал в рекомендуемой литературе ниже и проходим соответствующие практики в главе:
См. дополнительные пояснения.
Литература:
/714_Устойчивость по предсказуемости/
Видео:
/7193_Устойчивость по предсказуемости примеры/
/7185_Вероятностная предопределенность/
2. Выбор исходя из, Шести Приоритетов Обобщенных Средств Управления с выбором между Управлением и Самоуправлением
Надо иметь в виду, что понятие самоуправление — это не совсем процесс управления только собой или, когда всё само типа начнёт без вашего никакого участия самоуправляться. И тем более это не вход в процесс некого бездействия и тупого смирения, о чём мы говорили ранее, когда делали выбор, либо нам нападать, либо защищаться, либо ждать относительно нового фактора среды, который вдруг появился.
Лично для себя, Самоуправление — это наличие возможности самостоятельно решить все свои проблемы на основе именно всех пунктов ПФУ, без какой-либо помощи со стороны. То есть, это возможность управлять собой для себя. При этом организация Самоуправление это и возможность так использовать ПФУ, чтобы другие, к примеру, люди, техносфера или что-либо из окружающей среды, самостоятельно делало, то, что вам необходимо без вашего непосредственного участия до состояния полного успеха.
Особенно хочется заметить, что наилучшее управление и организация самоуправления — это управление, которое осуществляется на самых высоких приоритетах обобщенных средств управления.
Первый, Второй и Третий приоритет управления — это средства ввода и предоставление возможности к наилучшему Управлению и Самоуправлению которые имеют длительный и устойчивый результат.
Четвёртый, Пятый и Шестой приоритет управления — это средства, которые предоставляют возможность для Управления и Самоуправления на более короткие временные периоды с менее устойчивыми результатами, и которые становятся всё хуже при снижении приоритета до шестого пункта.
То есть, именно Первый, Второй и Третий приоритеты меняют вектор целей в единицах суперсистемы и единицы начинают самоуправляться в долгосрочной перспективе.
К примеру, на первом приоритете внедряется, осваивается метод и методология, в результате чего, допустим, мы получили и освоили метод, используя который мы уже сами можем определять, когда и что надо кушать. Имея методы добывать и готовить еду и к тому, же имея методологию через обработку дополнительной информации из окружающей среды усовершенствовать имеющиеся навыки, мы, по сути, никогда не будем голодные. То есть, мы сами сможем всегда справиться без посторонней помощи и решить проблемы питания. Имея навык работы на втором приоритете, мы всегда можем обратиться к сохраненной некой информации, к опыту предков и поступать именно так как они делали. В результате мы так же не останемся голодными. И даже имея только навыки использования третьего приоритета, то есть, имея некую идеологию еды, некие идеологические автоматизмы, которые в нас внедрило обществ, мы так же не останемся голодными, а имеющиеся алгоритмы поведения, к примеру, делай как все, обязательно приведут нас к решению вопроса питания.
Имея всё это, в своём багаже мы можем управлять собой.
Мы можем быть независимыми, творческими людьми, которые могут самостоятельно не только решать свои проблемы, но и развиваться, т. е. двигаться к строю психики Человек, а, следовательно, обрести долгую и счастливую жизнь.
Исходя из выше сказанного, надо всегда стремиться управлять любым процессом, подключая самые высокие приоритеты управления. Но при этом, не забывая, про ресурсы системы и временные ограничения исходя из рассматриваемой сложности проблемы. Так как иногда проще «передвинуть» с одного места на другое место некий предмет на шестом приоритете, чем разрабатывать новый метод автоматического передвижения или искать похожие примеры из прошлого, потратив много временных и человеческих ресурсов на подготовительный этап.
Повторим ещё раз.
Управление это — выявление объективных возможностей, целеполагание и достижение избранных целей в практической деятельности.
При этом возможна постановка всего двух задач.
Первая задача: мы хотим управлять объектом в процессе его функционирования сами
непосредственно:
- Это задача организации управления.
Вторая задача: мы не хотим управлять объектом в процессе его функционирования, но хотим, чтобы объект — без нашего непосредственного соучастия в процессе — самоуправлялся в приемлемом для нас режиме.
- Это задача организации объекта для самоуправления.
Различие задачи управления и задачи самоуправления заключается в том, что в задаче управления какие-то этапы полной функции управления и алгоритмику их реализации субъект-управленец берёт на себя. А в задаче самоуправления их же возлагает на систему управления объектом.
Простейший пример. Командир полка разработал инструкции и план занятий, назначил ответственных и дал команду на исполнение. В итоге у него вся его часть в определенное время самоуправляется по его программе и производит занятия по строевой подготовке.
В большинстве своём управленец берёт на себя первые функции ПФУ и тогда он становится концептуально властным. То есть он обретает, концептуальна власть.
Кроме того, в зависимости от того, какие этапы полной функции включаются, а какие исключаются из конкретного процесса управления, — задачи управления могут переходить в задачи самоуправления. Например, в технике — после того, как люди сделали всё, что необходимо на первом — четвёртом этапах полной функции управления, далее задача управления может быть преобразована в задачу самоуправления технического объекта.
Если очень грубо, то, к примеру, есть управление самим собой, а есть управление другими людьми в виде прямого командного управление людьми и к тому же, можно сделать так, что люди некую часть ПФУ будут сами реализовывать в ваших интересах.
Наша задача, исходя из имеющегося вектора целей, не только определиться с наилучшим и самым адекватным набором приоритетов управления для нашей цели и для каждой подцели, дабы равномерно были распределены и задействованы между собой варианты самоуправлении и управления исходя из всех шести возможных приоритетов управления. Но и сразу определиться с тем, мы будем управлять только лично собой или будем организовывать управление другими людьми, техникой и вообще окружающей средой и при этом, будет ли нам необходимо организовывать самоуправление всего этого для реализации нашей цели.
См. дополнительные пояснения.
Видео:
/7187_Задачи управления и самоуправления примеры/
/7178_6 приоритетов управления в ПФУ/
3. Выбор из вариантов схем управления – Программное, Программно-адаптивное, Предиктор-Корректор
Программная схема управления.
Программная схема управления не реагирует на изменение окружающей среды, с которой взаимодействует система управления. Нет обратных связей, только прямые связи, по которым идут команды.
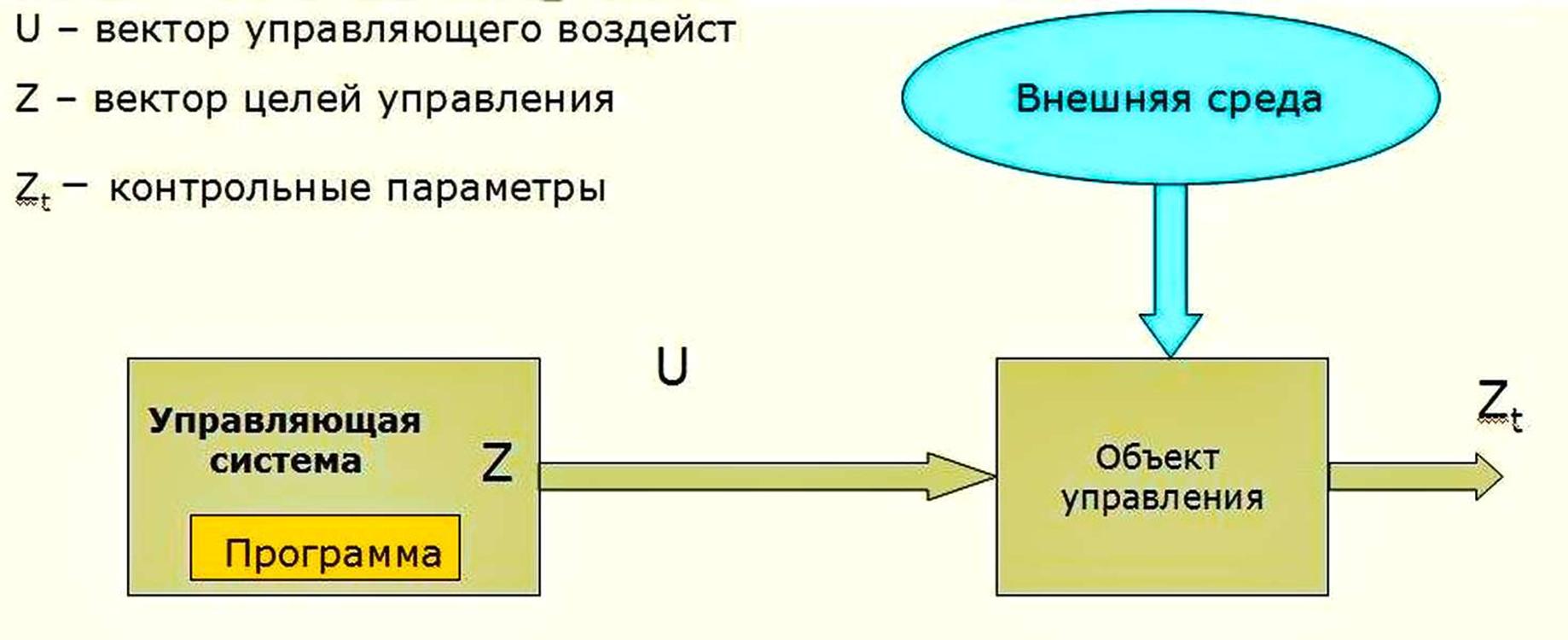
Команды идут в соответствии с внутренним таймером, который есть в системе управления. Программный способ управления позволяет достичь цели в тех случаях, когда обстоятельства применения программы соответствуют программе. Примеры такой схемы управления очень много в нашей жизни. Это всё, что сводится к принципу – нажал на кнопку и некий автомат отработал свою программу. Включил простую стиральную машинку, и пока программа не кончится, машинка не остановится. И ей будет по «барабану», рвётся ли бельё или нет, засыпал ли ты порошок или нет.
Программно-адаптивный способ управления.
Есть прямые связи, по которым идут управленческие команды. И есть обратные связи, по которым идут информационные потоки о состоянии среды, о состоянии объекта управления, о состоянии системы управления.
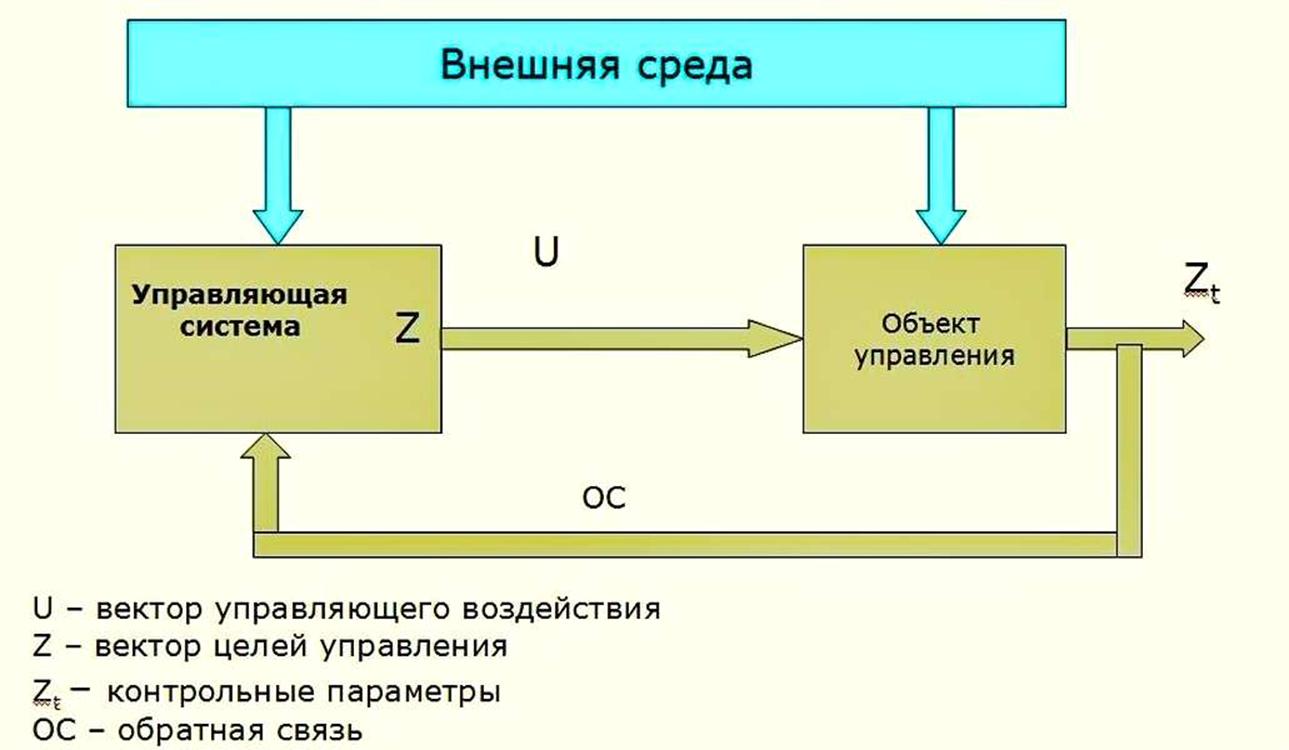
Программно-адаптивная схема реализует программу, не изменяя её, но адаптирует её под конкретику тех обстоятельств, в которых реализуется программа, либо концепция управления. Программно-адаптивная схема характеризуется тем, что она реагирует на свершившиеся изменения.
Предположим, что мы проектируем систему автоматического управления температурным режимом в помещении. Мы можем построить её так, что обогреватели будут включаться в результате регистрации системой падения температуры в помещении ниже заданного значения. Это будет реализацией принципа управления по отклонению.
Но мы можем построить систему такого назначения и иначе. Поскольку температура в помещении обычно падает после того, как снизится среднесуточная температура наружного воздуха, остынут стены помещения и в него попадёт холодный наружный воздух, то мы имеем возможность регистрировать температуру наружного воздуха, вычислять среднесуточную температуру. После чего, не дожидаясь того момента, когда стены остынут, и начнётся снижение температуры в помещении, давать команду на включение обогревателя в каком-то режиме немедленно в случае снижения среднесуточной температуры до заданного порогового значения. Это будет реализацией принципа управления по возмущению.
Кроме того, режим функционирования обогревателя может быть функцией разницы среднесуточной наружной температуры и текущего значения температуры в помещении. В последнем варианте в программно-адаптивной схеме управления будут сочетаться оба принципа управления — по возмущению и по отклонению.
Если нет возможности измерять контрольный параметр непосредственно в процессе управления (то есть в отношении него разорваны внешние и внутренние обратные связи). То в таком случае вместо не поддающегося непосредственному измерению значения контрольного параметра может быть использована его косвенная оценка на основе его производных, интегральных и иным образом информационно с ним связанных параметров, которые измеряются непосредственно. Однако в этом случае программно-адаптивное управление имеет свойство неограниченно накапливать с течением времени ошибку рассогласования по контрольному параметру.
Причина неограниченного накопления ошибки управления по контрольному параметру. Это накопление ошибок измерения и преобразования измеренных величин в процессе косвенной оценки необходимой характеристики.
Примерами такого рода ошибок полна летопись морских катастроф. Когда навигаторы, не видя берега в течение многих недель, из-за плохой погоды, не видя звёзд, вынуждены были определять место корабля по счислению (на основе расчётов). И из-за ошибок в измерении скорости хода, ошибок в оценке влияния ветра и течений, неточности хода корабельных хронометров (часов) и ошибочного показания компасов теряли точные координаты (место) и гибли на камнях, которые по их расчётам должны были находиться за много миль от них. Таков же механизм накопления ошибок инерциальными навигационными системами, употребляемыми в ракетно-космической технике, на подводных лодках и системах оружия, в которых текущие координаты объекта определяются на основе ввода исходных координат, измерения ускорений и их двукратного интегрирования.
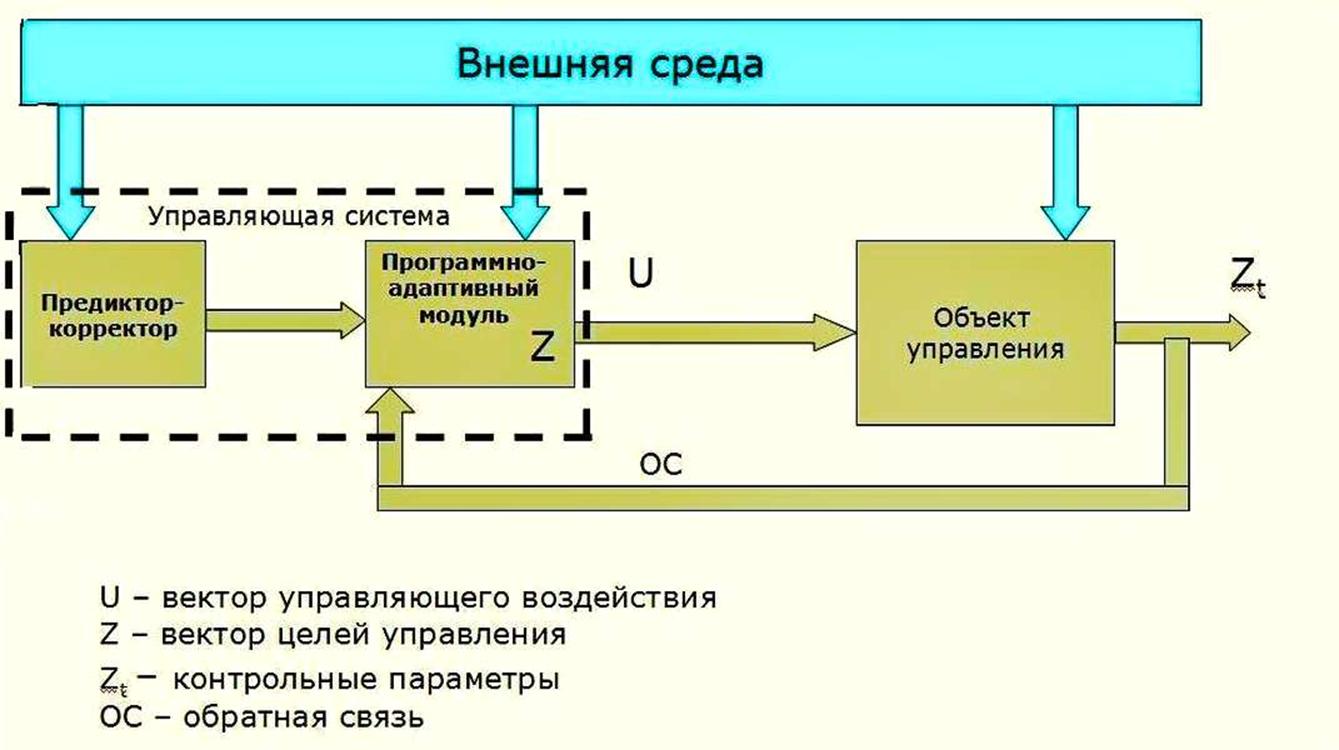
Схема управление Предиктор-Корректор.
Может оказаться так, что свершившиеся изменения таковы, что качество управления, мощность системы управления, доступные ей ресурсы, не позволяют нам обеспечить то качество управления, которое бы вы хотели.
Что в таких случаях можно сделать?
В таких случаях можно перейти к упреждающему управлению.
То есть, вы не ждёте того времени, пока что-то начнёт оказывать воздействие на вас и на управляемый процесс, и это воздействие по своей мощи будет таким, что система просто не обладает потенциалом для адекватной реакции на него. Вы делаете некий прогноз и упреждающими действиями начините воздействовать. То есть, если вы можете реагировать упреждающе на изменение среды. Если вы можете реагировать упреждающе на воздействие среды на объект или на процесс управления. То в этом случае вы можете организовать управление таким образом, что воздействие внешней среды не наберёт такую мощь, чтоб система не смогла на него отреагировать с приемлемым для вас качеством управления.
Но для того, чтобы организовать упреждающее управление, вы должны вести прогностику в темпе течения процесса управления, и вы должны корректировать управляющим воздействием управление исходя не только из того, что уже свершилось, но и исходя из прогноза развития ситуации. То есть, в этой схеме управления, которая называется «предиктор-корректор» – предуказатель-поправщик, в переводе на русский язык, задача об устойчивости объекта в смысле предсказуемости решается не только до начала управления и построения системы управления объектом, но и в темпе взаимодействия объекта с внешней средой. Это позволяет повысить качество управления, но требует иной организации процесса управления. Высший вариант реализации схемы «предиктор-корректор» – это интеллектуальная схема управления, в которой искусственный или индивидуальный человеческий или коллективный интеллект решает задачу об устойчивости в смысле предсказуемости, изменения концепции управления в темпе развития ситуации.
Если говорить грубо, то суть в том, что при работе программно-адаптивной схемы, всегда присутствуют некие «задержки» по прямым и обратным связям. То есть, поступление информации, принятие решение и последующие ваши действия постоянно запаздывают. И если эти запаздывания увеличиваются выше степени допустимого всей системы, то это приводит уже к конкретным ошибкам в управлении.
К примеру, вам необходимо совершить сложный поворот машины, вы крутите рулевое колесо, но колесная пара поворачивается очень медленно и вы, по сути, не вписываетесь в поворот. В этом случае, зная эту особенность вашего агрегата, вы начинаете в подобной ситуации процесс поворота заранее. То есть, вы крутите руль, до того, как поворот начинает свой изгиб и тогда задержка системы не будет для вас критична. По большому счёту, вы совершаете предикт, вы предсказали событие и внесли заранее корректировку вашего движения до начала наступления события. Или, к примеру, вы узнали, что ваш враг готовит на вас нападение. В этом случае вы заранее развернули соответствующую оборону там, где необходимо. Следовательно, вы совершили управление по схеме предиктор-корректор.
Получается так, что если вы в темпе развития ситуации можете прогнозировать её развитие, то значит, вы можете строить управление упреждающе по отношению к возмущению. И в этом случае вы получаете так называемую схему управления – предиктор-корректор.
Это название происходит от метода в вычислительной математике, в котором решение находится через метод последовательных приближений по схеме:
прогноз решения – проверка решения – корректировка прогноза.
И всё это проводится в цикле до желаемого результата.
Сейчас в ракурсе рассмотрения схемы предиктор корректор особенно хочется заметить, что если вы ничего не знаете о статистической предопределенности и методов вычисления вероятности, то естественно говорить о какой-либо предсказуемости вообще не может быть и речи.
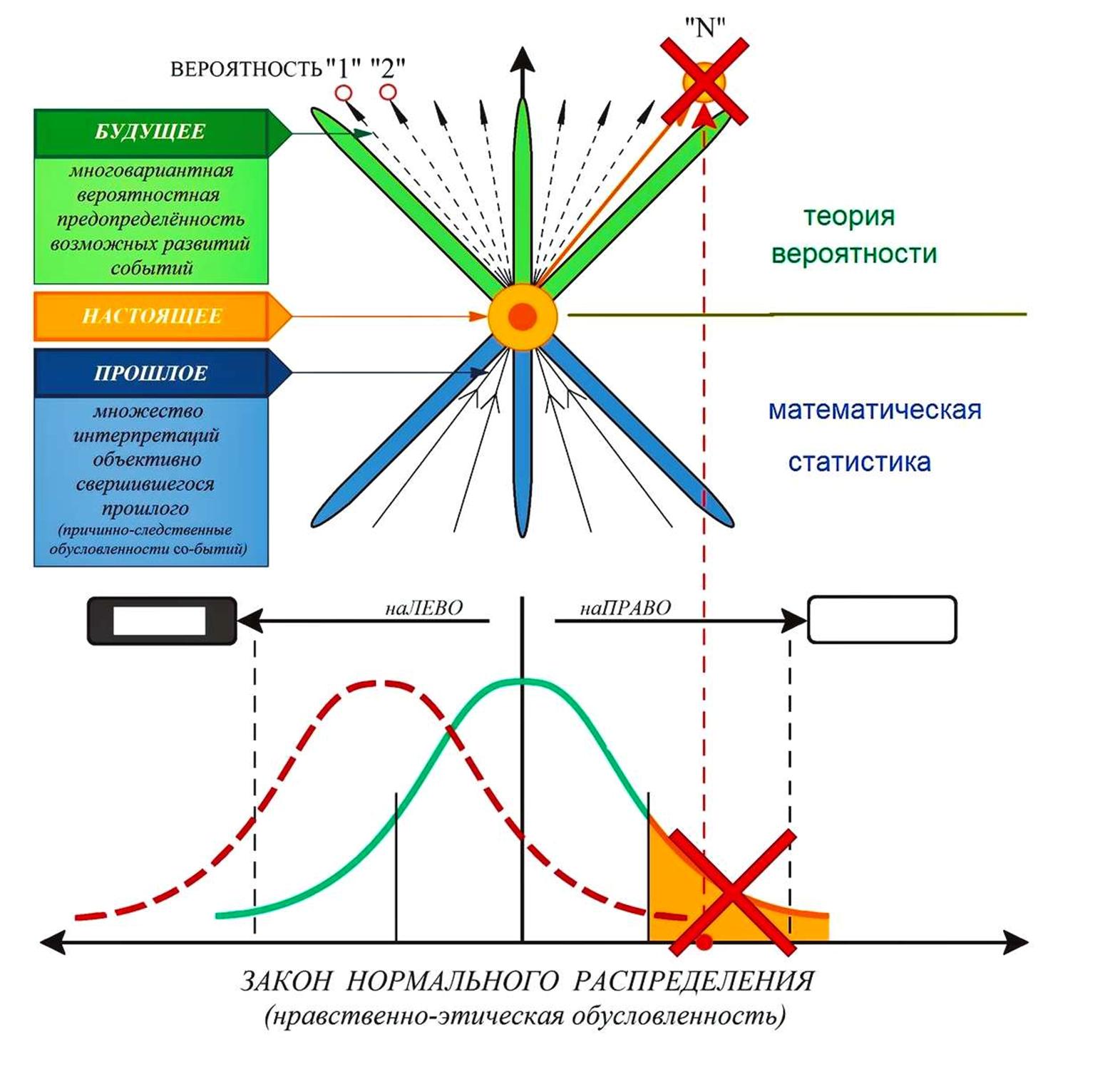
Именно теория вероятности помогает рассчитать, какой из множества вариантов будущего может реализоваться в большей степени исходя из нашего замысла, а через аппарат математической статистики мы можем как раз анализировать прошлые варианты и на этой основе как раз и выводить будущие предрасположенности для нашего случая.
Вероятностная предопределенность будущего всегда однозначно, но вот содержание этого будущего многовариантно и именно математическая статистика и теория вероятности помогает приблизиться к оптимальному выбору.
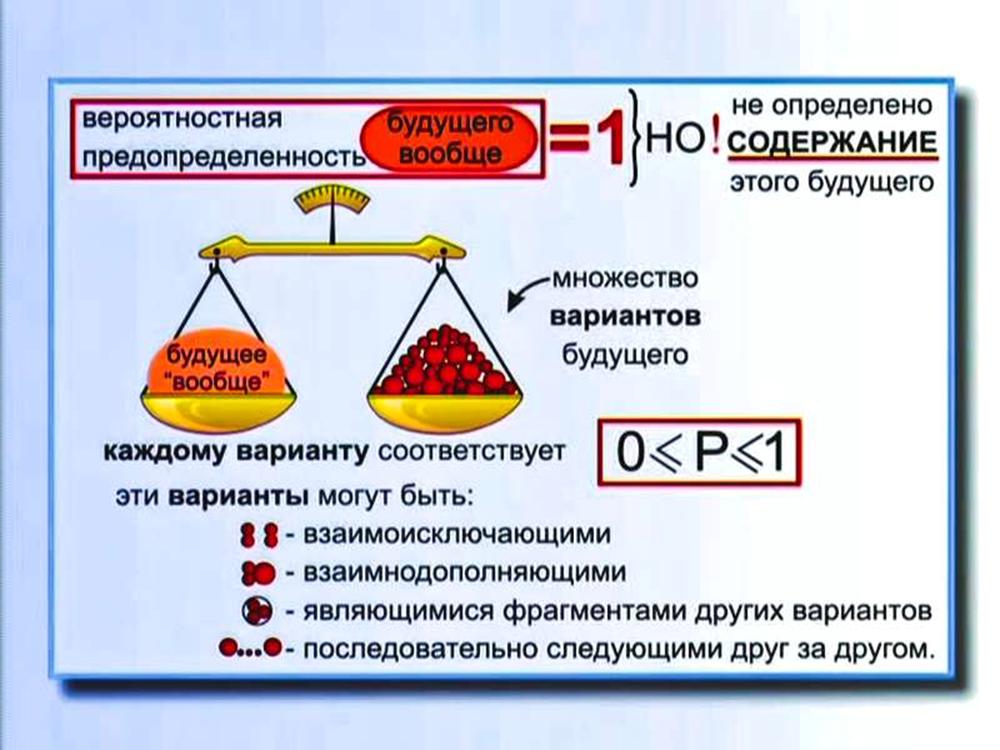
По сути, имеем то, что будущее многовариантно, и всё зависит именно от субъекта управления при его выборе того или иного варианта, который он считает для себя оптимальным.
Теперь нам необходимо подробнее разобраться с термином «Замкнутая Система».
При начале любого управления необходимо структурировать информацию, связанную с задачами управления.
Как в самом общем виде структурируется информация?
Первое надо разграничить объект управления и среду.

Что относится к объекту – это объект, что относится к среде – это среда.
Связывают среду и объект некие процессы взаимодействия. Управление предполагает наличие системы управления. Система управления связана с объектом управления контурами прямых и обратных связей.
Прямые связи – это те связи, по которым управляющее воздействие передаётся на объект управления.
Обратные связи – это те связи, через которые система управления получает информацию о состоянии объекта – это классика.
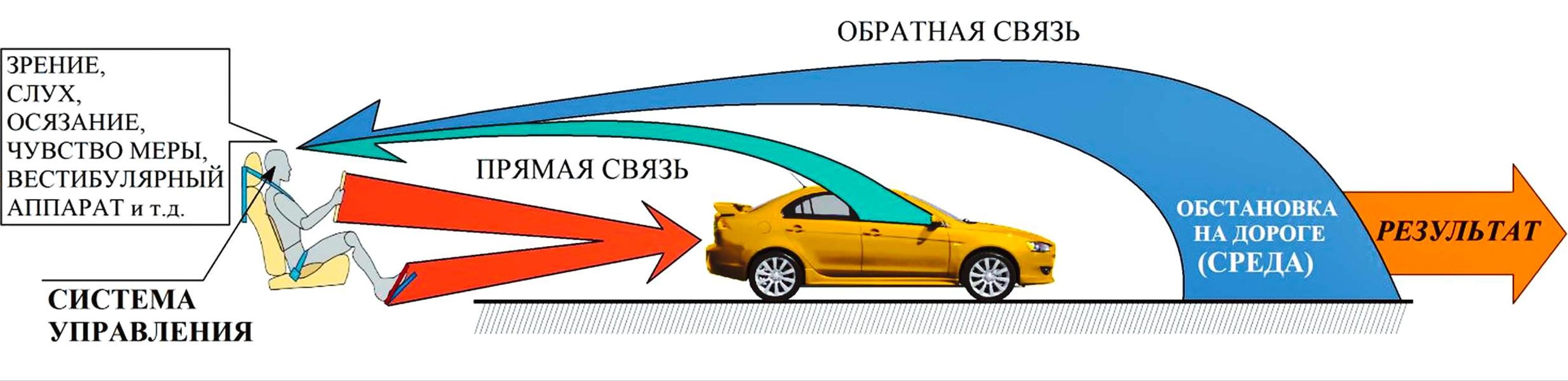
Простейший пример замкнутой системы это автомобиль с водителем. Автомобиль — объект управления. Сознание и подсознание водителя — система управления. Обратные связи замкнуты через зрение, слух, осязание и вестибулярный аппарат водителя, а прямые — через его руки и ноги, воздействующие на исполнительные органы.
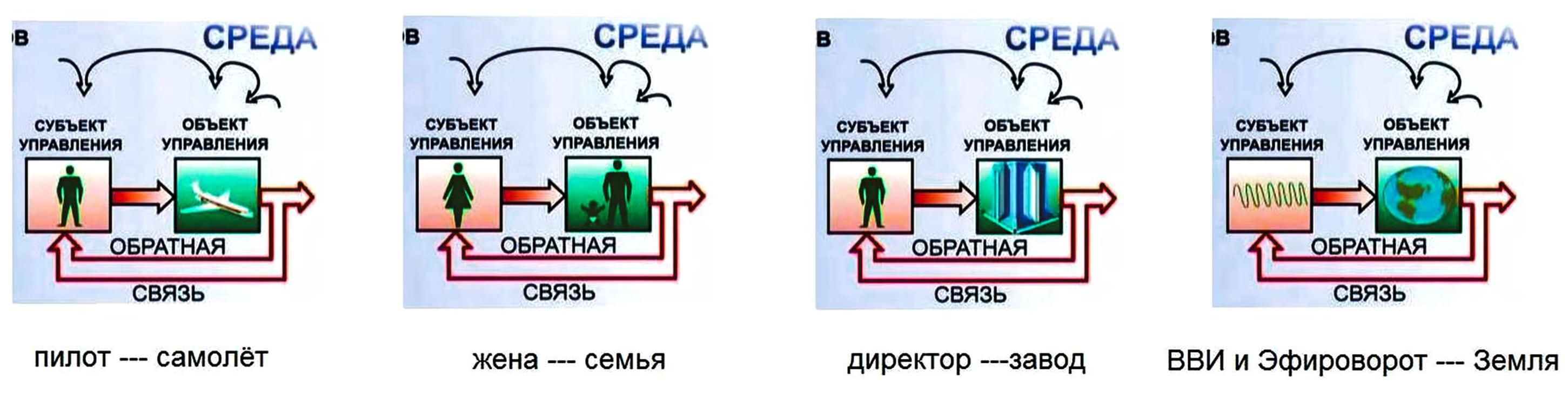
Ниже приведено ещё ряд примеров замкнутой системы.
ДОТУ предполагает расширенное понимание прямых и обратных связей.
В Достаточно Общей Теории Управления прямые связи идут не только в объект, но идут и в среду, с которой взаимодействует объект. А обратные связи идут в систему управления не только из объекта управления, но идут и из среды, с которой взаимодействует объект. Тем не менее, и в классике, и в Достаточно Общей Теории Управления система управления, соединённая с объектом контурами прямых и обратных связей, называется замкнутой системой – это термин. Различие классики и Достаточно Общей Теории Управления в том, что прямые и обратные связи в Достаточно Общей Теории Управления трактуются расширенно. Часть прямых связей уходит в среду, часть обратных связей приходит в систему управления из среды.
Чем это вызвано?
Это вызвано тем обстоятельством, что Достаточно Общая Теория Управления предполагает рассмотрение иерархии вложенности процессов управления друг в друга.
Кроме того, она предполагает рассмотрение таких ситуаций, когда одним и тем же объектом управления или одной и той же замкнутой системой предполагают управлять или реально управляют разные субъекты. Т. е. если у вас есть замкнутая система, в ней есть система управления, то да, действительно, некоторые обратные связи идут в неё только из объекта управления. Но некоторые обратные связи в систему управления идут также и из среды. И если в среде находится другой субъект. То есть, иная система управления, которая претендует на управление этим же объектом. То обратные связи первой системы управления становятся прямыми связями для второго субъекта, который оказывает воздействие на систему управления первым. Поэтому происходит вот такая инверсия прямых и обратных связей.
В случае конфликтов управления это очень важно, потому что встаёт вопрос о том, чьё управление эффективно. Но то, что с точки зрения одного субъекта является его прямыми связями, с точки зрения другого, в этом случае, является его обратными связями. И наоборот. То, что с точки зрения первого субъекта является его обратными связями, с точки зрения второго субъекта является его прямыми связями. Поэтому, исходя из того, что такие ситуации в жизни встречаются достаточно часто, в ДОТУ принято расширенное толкование термина «прямые и обратные связи». (Вспомните пример с карандашами. )
Дальше в классике есть ещё такое понятие как положительные обратные связи и отрицательные обратные связи. В классике они разделяются на положительные и отрицательные на том основании, что если объект был в каком-то устойчивом режиме и отклонился от устойчивого режима функционирования, то по цепям положительных обратных связей проходит информация, которая уводит объект ещё далее от устойчивого режима и уклонение нарастает. А по обратным отрицательным связям проходит информация, которая влечёт за собой возврат объекта к ранее бывшему устойчивому режиму. Но опять же, если мы рассматриваем ситуации, когда объектом могут управлять разные субъекты, и разные субъекты обладают разным иерархическим статусом, то получается так, что, если есть первый субъект и объект управления, они образуют замкнутую систему.
Эта система некоторым образом самоуправляется. А есть второй субъект, который является иерархически высшим по отношению к первому субъекту, и он тоже управляет некоторым образом первым объектом и субъектом. То получается такая ситуация, что если первый субъект ведёт управление процессом приемлемым образом для второго субъекта, то второму субъекту нет надобности, вмешиваться в управление. Если субъект первый выводит объект из пределов допустимого управления, то второй субъект должен на это как-то реагировать. И, соответственно, отрицательные обратные связи – они принимают информацию, которая сдерживает процесс уклонения объекта управления от режима, предписанного иерархически высшим субъектом управления. Но если же отклонение носит характер, который признаётся иерархически высшим субъектом управления полезным, то по цепям обратных связей идёт информация, которая способствует уклонению объекта управления от первоначального режима и далее. Т. е. в первом случае иерархически высший субъект оказывает сдерживающее, подавляющее воздействие на процесс уклонения от первоначального режима. А во втором случае он оказывает поощряющее, поддерживающее воздействие. Поэтому отрицательные обратные связи в Достаточно Общей Теории Управления разделяются на два класса.
То, что в классике называется отрицательными обратными связями, называется сдерживающими обратными связями, подавляющими обратными связями. А положительные обратные связи называются поощряющими обратными связями, поддерживающими обратными связями.
К примеру, если некоторые процессы описывать как задачи самоуправления, то хотим мы того или нет, в них присутствуют положительные обратные связи, которые уводят систему от исходного положения под воздействием начального возмущения. Ярким представителем такого рода процессов, которые включают в себя положительные обратные связи, являются любые конфликты.
Допустим, было исходное положение системы с некоторым количеством объектов. Тогда воздействие одного объекта на другой воспринимается как агрессия.
Что происходит дальше?
Дальше естественно идёт «ответка». «Ответка» тоже воспринимается как акт агрессии. Ну, а дальше пошло то, что называется эскалация войны. То есть, наращивание усилий. Ну, вот если описывать это дело в терминах Теории Управления, то в системе в этом случае работают именно положительные обратные связи.
Но если далее предположить, что есть некий субъект, которому выгоден этот конфликт (любая война). То для него это уже будут отрицательные обратные связи, на основе которых он сможет осуществлять именно управляемое расширение конфликта.
Хочется ещё раз заострить внимание на том, что существует понятийная разница с классическим описанием замкнутой системы современной науке и описанием её в ДОТУ. Разница в том, что в классике не учитывается иерархия управления, по сути, нет понятия ВВИ, Эгрегоров и вообще любого «левого» управления. К примеру, как управления от ФРС США экономикой России. Вследствие чего, по большому счёту, у России отсутствует собственная независимая денежная система как токовая, благодаря чему все последние десятилетия мировой капитал решает свои проблемы за счёт тружеников и ресурсов России.
Теперь мы можем вернуться к тому что, наилучшее управление возможно исключительно в схеме управления предиктор корректор, следовательно, этой схеме мы и уделим основное внимание.
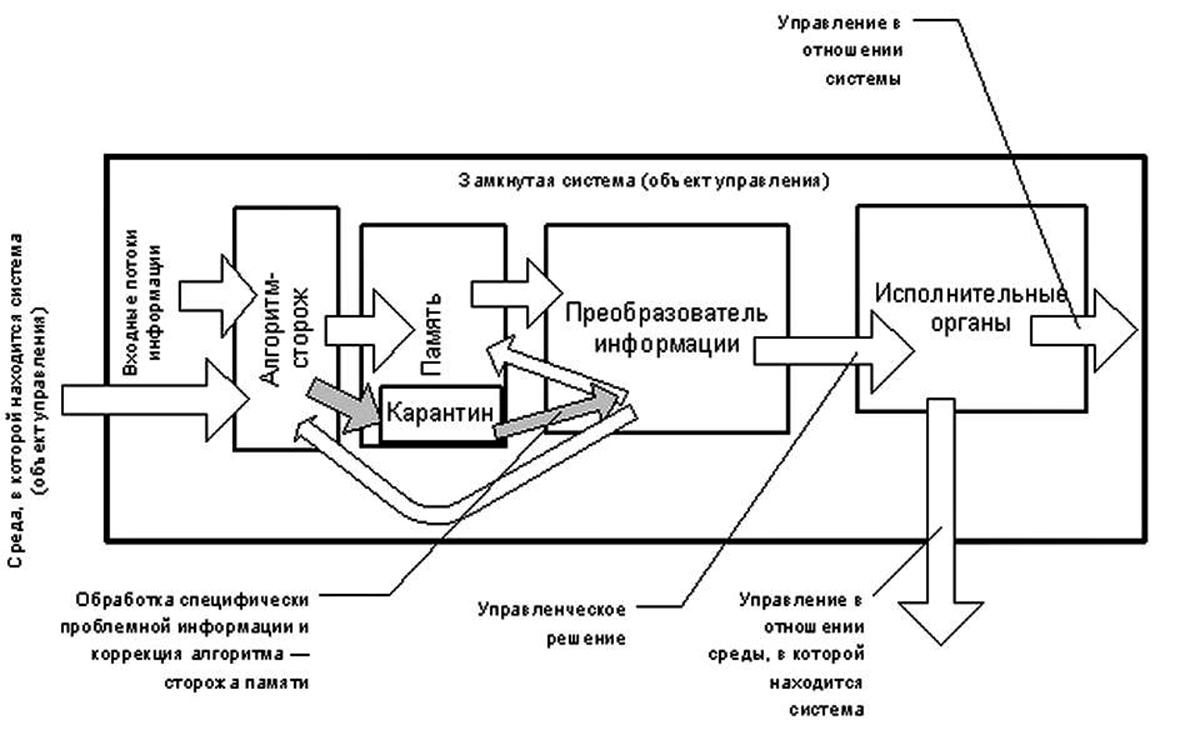
Процесс управления любым объектом предполагает, что уже известны основные законы существования управляемого объекта в окружающей среде. Поэтому его реакция на воздействие окружающей среды и управляющее воздействие предсказуема. А сам объект принадлежит к категории устойчивых объектов. То есть, сколь угодно малые изменения воздействия окружающей среды и управляющего воздействия не приводят к непредсказуемому состоянию объекта.
Тогда может быть построена система управления объектом, которая в соответствии с вектором целей управления на основе информации о состоянии объекта и окружающей его среды формирует управляющий сигнал, т. е. закодированную информацию о том, каким должно быть управляющее воздействие, чтобы поведение объекта отвечало цели управления.
Управляющий сигнал через прямые связи подаётся на исполнительные органы, которые обеспечивают управляющее воздействие на объект.
По цепи обратных связей в систему управления поступает информация о состоянии окружающей среды объекта, исполнительных органов и т. п. в процессе управления.
Объект управления, система управления, соединённые воедино прямыми и обратными связями, образуют замкнутую систему контуров управления.

Одной из характеристик замкнутой системы является быстродействие, которое для разных систем оценивается по-разному. Но одна из главных оценок это время, в течение которого система управления в состоянии привести параметры объекта управления к необходимым параметрам. То есть время, измеряемое от момента, когда поступила команда перевести объект в новый режим существования, это время, когда началось возмущающее воздействие окружающей среды или время, выводящее объект из балансировочного режима и т. п.
Качество управления может оцениваться по-разному и определяется, исходя из цели управления, поэтому в зависимости от цели управления одни и те же характеристики замкнутой системы могут оцениваться как удовлетворительные и как неудовлетворительные, но в большинстве случаев, чем выше быстродействие, тем выше качество управления системами сходного назначения.
Быстродействие зависит от обобщённых динамических характеристик объекта и от системы управления.
В силу того, что замкнутой системе управления необходимо время на реакцию на возмущение, управляющее воздействие всегда отличается от величины возмущающего воздействия, что налагает некий предел на максимально возможное качество управления при управлении, реагирующем на уже свершившееся изменение параметров состояния объекта.
Если же, однако, имеется необходимость повысить этот предел качества, то переходят к схеме управления предиктор-корректор.
В ней, зная состояние окружающей объект среды, постоянно оценивается величина возмущающего воздействия, моделируется в ускоренном времени, по сравнению с реальным поведение объекта, формируется управляющий сигнал, и управляющее воздействие начинает компенсировать воздействие возмущения на объект раньше, чем в случае управления по текущим параметрам. В процессе управления по схеме предиктор-корректор текущие параметры объекта сравниваются с соответствующими прогнозируемыми параметрами, и на этой основе корректируется и прогноз, и управляющее воздействие.
Разницу между управлением, реагирующим на изменение параметров режима объекта, и управлением по схеме предиктор-корректор хорошо иллюстрирует управление небольшим катером при ветре и волнении рулевым-новичком и опытным рулевым.
Задача рулевого — удерживать катер на курсе. Когда волна ударяет в борт, рулевой-новичок некоторое время не реагирует, и катер успевает свалиться с курса и набрать некоторую «инерцию» вращательного движения к тому моменту, когда рулевой переложит руль для компенсации воздействия волны. Рулевой-новичок после возвращения корабля на заданный курс не успевает обычно переложить руль немного на другой борт, чтобы компенсировать «инерцию» вращения корабля при возвращении на курс, и корабль уклоняется от курса в противоположную сторону.
Опытный рулевой, завидев волну, загодя перекладывает руль катера, чтобы катер рыскнул ей навстречу, и тогда волна сама возвратит катер на курс. Опытный рулевой также загодя переложит руль на удержание «инерции» вращения корабля при возвращении его на курс и выходе из циркуляции.
Поскольку органы управления корабля обладают ограниченной эффективностью, то в тяжёлых погодных условиях рулевой-новичок, реагируя на свершившееся изменение курса корабля, потеряет управление; а опытный рулевой, загодя реагируя на подсознательно ожидаемое изменение, удержит корабль на курсе.
Так же и политика, являясь искусством реализации возможного, предполагает политическую активность не столько как реакцию на свершившиеся события, сколько умение реагировать, предвосхищая события. Но и здесь надо знать меру, чтобы политика не была реакцией на собственные фантазии и ночные страхи.
Схема предиктор-корректор предполагает владение методами прогнозирования будущего.
Человеческое подсознание, связанное с Эгрегорами и с Всевышним, способно отображать (моделировать) процессы в окружающем его мире в темпе более высоком, чем они протекают в реальности, т. е. более-менее способно к прогнозу. В своём индивидуальном поведении человек управляется в большинстве своём по схеме предиктор-корректор.
Человек — существо общественное, и все человеческие общества всегда управлялись по схеме предиктор-корректор. Другое дело, кем и как осуществлялось управление, какие были цели…
Вначале управление осуществлялось бесструктурным способом, но в ходе общественного развития необходимость повышения качества управления привела к образованию соответствующих общественных структур, которые хранили тайны прогноза, будущего (часть первобытного герметизма) и в силу этого пользовались у остальных членов общества определённым авторитетом.
Необходимо так же понимать, что, предсказание формируется на основе сложившегося у человека мировоззрения и миропонимания. И если они не адекватны окружающей среде, к примеру, довлеет – «Я-центризм», калейдоскоп и всё это на предельных различениях в виде материи, времени, пространства, энергия. То естественно, ни о каком благоприятном прогнозе, а, следовательно, и полноценной работе схемы предиктор корректор, не может, иди и речи.
Для образного понимания вопроса о предсказании приведём следующее повествование:
«Знахарь начал рассказ с того, что древние индейцы считали пост делом очень почётным. Они постились (голодали) иногда шесть, семь дней, пока тело и дух их не делались светлыми, что приготовляло их к снам. Стремлением древних духовидцев было увидеть во сне солнце, так как они думали, что этот сон делал их способным видеть всё на земле. И они обыкновенно преуспевали в этом путём долгого поста и долгих размышлений о предмете своих желаний. Посты и сны практиковались с раннего возраста. Всё, что юноша видит и испытывает во время поста и снов, считается им за истину и становится руководящим началом в его последующей жизни. За советом в делах он обращается к этим откровениям. Если посты были для него благоприятны, и народ уверует в его способность прозревать будущее, то для него открыт путь к высшим почестям. Пророк, продолжал рассказчик, испытывает свою силу сначала втайне, в присутствии одного лишь лица, свидетельство которого необходимо в случае удачи. Начав развиваться на этом поприще, он отмечает образы своих снов и откровений знаками на древесной коре или другом материале, хотя бы для этого ему потребовалась целая зима. И таким образом сохраняет память о своих главнейших откровениях, Если его предсказания сбываются, свидетель заявляет об этом, а памятные знаки служат дальнейшим доказательством его пророческой силы и искусства. Время увеличивает его силу. Наконец его таблички представляются в совет стариков, которые совещаются об этом предмете, так как весь народ верит в эти откровения. Старики решают дело и объявляют, что человек одарён пророческим даром — вдохновлён мудростью и способен быть духовным водителем своего народа. Таков был, по словам рассказчика, древний обычай, и знаменитые воины-предводители достигали власти этим путём"».
Желающие могут считать этот рассказ свидетельством "невежества дикарей". Но здесь стоит обратить внимание, что повествование ведёт человек, который воспринял его с позиций "здравого смысла" "цивилизованного" христианина, поэтому следует отметить следующие факты:
- душа индейца-язычника, живущего в бесклассовом обществе, более полноценная, чем «калейдоскоп» закомплексованного христианина. Поэтому отображение и моделирование у индейца точнее, чем у "цивилизованного" скептика;
- посты и уединённое размышление позволяют снять с души человека информационные потоки житейской суеты и мельтешения, часть физиологии, чем высвобождается обычно занятая часть ресурсов нервной системы, что также повышает качество отображения и моделирования;
- за пророчествами следует факт их проверки советом старейшин — критерий индивидуальной практики;
- весь ритуал подвергся проверке и отточен в течение жизни многих поколений — критерий общественной практики;
По сути, все обряды и ритуалы, в современности, представляющиеся "дикими" и неуместными, в период их зарождения и становления отвечали насущным потребностям породившего их общества, в них всегда есть рациональное зерно, но в пределах миропонимания для того времени.
Но даже, исходя из нынешних реалий, указанная процедура отбора пророков — работоспособна.
У разных племён этот отбор был организован в разных формах, но он был у всех. Колдуном, шаманом, пророком мог стать далеко не каждый, а только тот, кто мог доказать обществу свою способность к этому виду общественно-полезной деятельности, вполне удовлетворявшей тогда потребности современников.
Именно так и произошло выделение в обществе системы управления в виде «шаманско-старейшинской» структуры, устойчиво существовавшей при смене поколений.
В состав таких структур входили те, кто долго жил, много помнил, был опытен и мудр, — они являлись своего рода общественной памятью и могли сформировать решение возникшей проблемы на основе прошлого опыта жизни общества. Кроме них, в структуры входили те, кто обладал способностью пророчить будущее вне зависимости от рассуждений на основе своего и чужого личного опыта прошлого.
Эти структуры оценивали состояние природы и общества; на основании опыта прошлого и «шаманских» прогнозов будущего соотносили с ними цели общественной деятельности; формировали то, что мы сейчас называем концепцией развития общества.
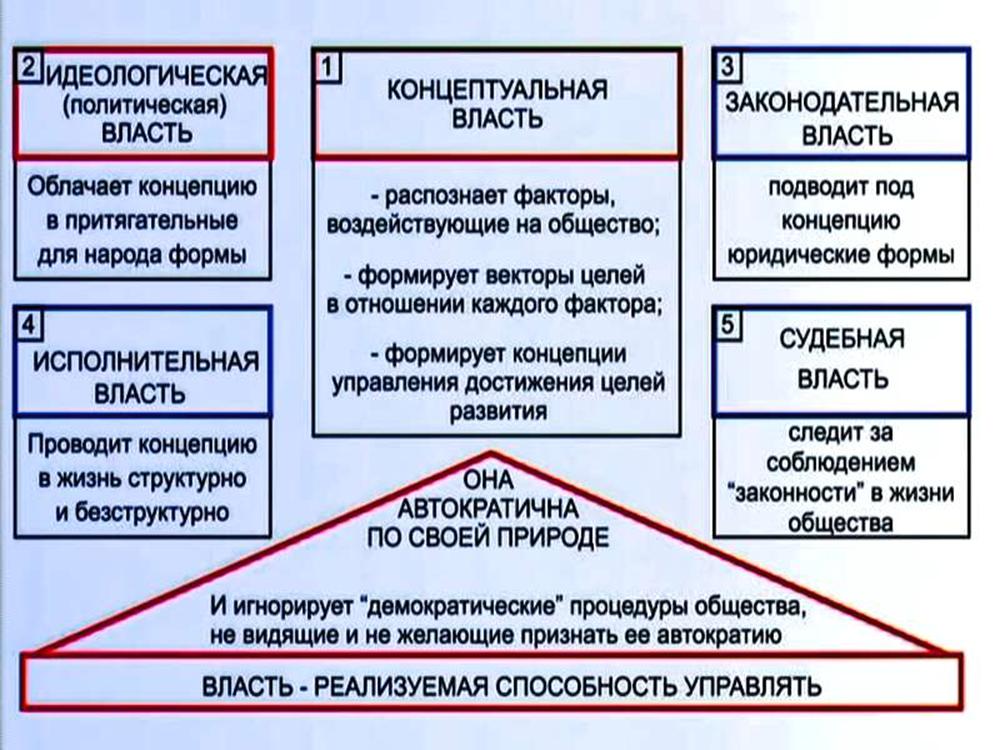
Формирование концепции развития общества — исходная часть единой функции управления обществом, определяющая все последующие фазы процесса управления, — её несёт концептуальная власть. Реализацию концепции развития в первобытнообщинном обществе обеспечивала та же самая «шаманско-старейшинская» структура.
В силу того, что общество было ещё бесклассовым, структура служила интересам всего общества и была открыта, в зависимости от заслуг перед обществом, представителям всех семей и кланов.
В ходе общественного развития и начавшегося классового расслоения «шаманско-старейшинская» структура разделилась ещё раз, породив жреческие структуры (в том числе и тайные) и государственный аппарат.
Жречество отгородилось от общества тем, что понимало для себя религию общества совсем не так, как объясняло её же обществу.
Жречество СТАЛО ХРАНИТЕЛЕМ ФАКТОЛОГИИ ЗНАНИЯ И МЕТОДОЛОГИИ ПОЛУЧЕНИЯ НОВОГО ЗНАНИЯ.
В результате общество распалось на:
- "жреческие кланы", передававшие Знание по наследству и воспитывавшие своих детей в определенных традициях. Вследствие этого жречеству уже стали не нужны пророки из "толпы";
- "элиту", которой жречество давало только фактологию Знаний и готовые рецепты, и из состава которой формировался государственный аппарат;
- "толпу" — народные массы, с минимальным уровнем образования, достаточным для их деятельности в общественном разделении труда вне сферы управления, в свою очередь распавшиеся на торговцев и производительно трудящееся население.
По сути, это в общем и соответствует 4–5‑кастовому делению многих обществ древности.
Единая функция управления также распалась.
За жречеством, ставшим по ту сторону "авторитета богов", осталась ИСХОДНАЯ ВЛАСТЬ, концептуальная власть — высший уровень иерархии системы общественного управления, идеологическая власть — возможность (право) облекать концепцию развития в формы господствующей идеологии (религии) и корректировать идеологию и концепцию по мере необходимости.
Если Вам не нравится ваше личное состояние, общественное устройство, развитие общественных процессов, то единственный способ поправить положение дел — создать личный Предиктор, после чего создать общественный Предиктор. Как группу людей, работающих над своим миропониманием, которая сможет понять общий ход вещей; сформировать прогноз вариантов устойчивого будущего; выбрать из них приемлемый; и замкнув на себя государственность, отстроиться от глобального предиктора (или подмять его под себя) и реализовать выбранный вариант.
Предиктор как личный, так и общественный становится концептуальной властью после захвата контроля над контуром прямых и обратных связей и освоением первых четырёх пунктов ПФУ. В мире нет добреньких дядей, которые сделают за вас то, что Вы должны сделать сами, чтобы ваши дети и внуки не были рабочим скотом.
Концептуальная власть — это общественное проявление того факта, что кто-то обладает наиболее высоким уровнем понимания всего, что происходит в обществе и окружающей данное общество социальной и природной среде. И использует это понимание для достижения своих целей, не противоречащих законам бытия общества, но стоящих над целями всех других членов общества или включающих их, как более близкие, в себя.
Концептуальная власть — самовластна по своей природе. Если кто-то знает больше, чем окружающие, то он самовластный хозяин этого знания.
Он может молчать о нём и использовать его как «ноу-хау» (знаю, как), а остальные могут не догадываться даже о существовании этого «ноу-хау». Он может искренне хотеть поделиться своим знанием с окружающими, но они могут не найти общего языка для того, чтобы окружающие восприняли новое для них знание.
Концептуальная власть одних — выражение их более высокого уровня миропонимания; этот уровень нельзя купить; его нельзя выдавать человеку "во временное пользование" в связи с демократическим или недемократическим занятием той или иной должности; им нельзя завладеть насилием.
Концептуальная власть — это власть концепции, которая вырабатывается на основе адекватного предиктора как лично или в полноценном тандеме. А успешность работы, такой власти, зависит от мировоззрения, которое сложилось у взявшихся за это дело управленцев. Лучше даже сказать, зависит от степени адекватности их мировоззрения к реальной окружающей среде.
Современная "Демократия", отрицающая ОБЪЕКТИВНОЕ самовластие концептуальной власти, — это либеральная ДУРА, которая будет таковой, пока не признает этого факта, а до тех пор ею будут помыкать, управляя в обход контроля сознания через подсознание.
Самовластный характер концептуальной власти в силу неизбежности существования разницы в уровне миропонимания людей сохранится и при любом общественном строе. Отрицать объективное самовластие концептуальной власти — столь же глупо, как отрицать любой из законов Природы.
Очень важное дополнение.
Особенно хочется заметить то, что во всех наших практиках мы предполагаем, что вся входящая информация не требует подтверждения, и она заведомо достоверная. Но по жизни это далеко не так. Следовательно, всю информацию, на которой основывается наше управление по ПФУ, необходимо очень серьёзно и метрологически состоятельно проверять, проверять и ещё раз проверить. К тому же, у вас должен быть, так сказать, отработан алгоритм защиты от недостоверной информации, который должен соответствовать определенному алгоритму её приёма и обработки. Ниже приведён для иллюстрации один из алгоритмов.
Подробнее этот вопрос вы можете проработать на основе дополнительного материала.
См. дополнительные пояснения.
Литература:
/707_Достоверность информации/
/711_Системы и схемы управления/
4. Выбор из вариантов – Структурный, Бесструктурный, Виртуальный.
В Достаточно Общей Теории Управления есть понятие о способах управления. Таких способов управления три.
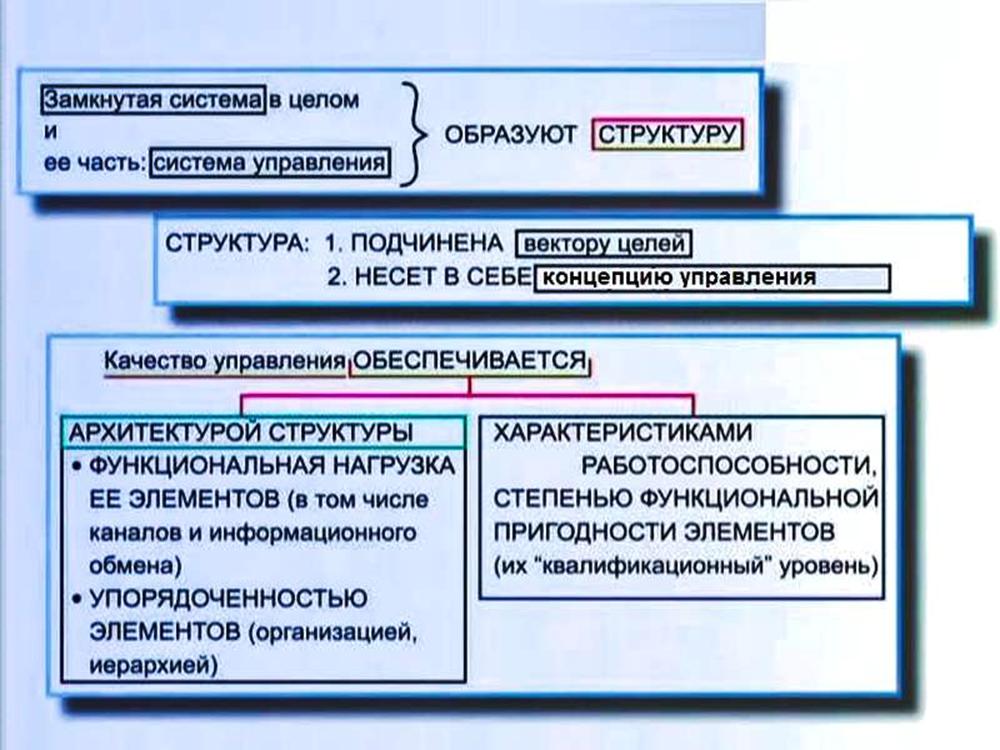
Структурный способ управления, когда носителем алгоритмики управления является специально построенная структура.
Качество управления определяется архитектурой структуры, т. е. набором элементов функционально-специализированных, из которых она построена и взаимосвязи этих элементов друг с другом, и характером их взаимодействия друг с другом и с внешней средой. Ошибки в построении структуры ведут к падению качества управления.
Но возможны ситуации, в которых управление есть, а структур, вот в таком смысле, как они понимаются всеми, нет. Ну, например, вот стоит задача управления – сбор денег за проезд в транспорте.
Вариантов два: деньги собирает либо кондуктор, либо водитель, который по совместительству выполняет обязанности кондуктора.
Но, предположим, что кондуктор. Какие обязанности? Собрать деньги с пассажиров, выдать пассажирам сдачу, выдать билеты. Если у пассажиров возникают вопросы на тему где сойти, как пройти куда-то, то кондуктор, в большинстве случаев, знает маршрут и то, что прилегает к маршруту, и даёт соответствующие советы пассажирам.
Ну, а теперь вспомните советские времена. Автобус без кондуктора, в салоне стоят кассы, пассажиры входят в салон, опускают денежку в кассу, отрывают билетик. Если кому-то нужна сдача, то следующий пассажир вместо того, чтобы опустить денежку в кассу даёт денежку пассажиру, которому нужна сдача. Если у кого-то возникают вопросы на тему о том, где сойти, как пройти, то в большинстве случаев пассажиры, едущие по этому маршруту, тоже знают маршрут, где чего находится поблизости от маршрута – с высокой вероятностью в салоне находится пассажир, который может ответить на эти вопросы.
То есть, кондуктора нет, персональный состав пассажиров в салоне меняется, но, тем не менее, задача управления решается в статистически предопределённом смысле. Возникает вопрос: а качество управления при наличии кондуктора выше или ниже, чем при той ситуации, когда в салоне стоят кассы? Ответ тоже двоякий, потому что понятие качества управления – оно субъективно обусловлено и возникает вопрос – «А чего, собственно говоря, вы хотите?» Если вы хотите кондуктора, то вы должны платить ему зарплату. Если кондуктора нет, то вы экономите на зарплате кондуктора, но появляется дополнительное количество зайцев, едущих без билета, и вы должны соответственно увеличить штат контролёров. И если расходы на дополнительных контролёров меньше, чем расходы на содержание штата кондукторов, то вы получаете некоторый выигрыш и можете считать, что качество управления в автобусе без кондуктора выше, чем при наличии кондуктора.
Но есть следующий уровень рассмотрения. Для того, чтобы система работала, вы должны производить билеты. Для того, чтобы производить билеты надо заготавливать лес, производить бумагу, печатать билеты, для печати нужны соответствующие краски. Вы должны доставить билеты в автохозяйство. Автохозяйство должно их где-то как-то хранить. Ну, а потом пассажир купил билет, вышел из автобуса и, в лучшем случае, бросил его в урну, а в худшем случае бросил его просто на землю. И, в общем, получается так, что вы производите билеты для того, чтобы их выбросить на землю, а потом заниматься уборкой города.
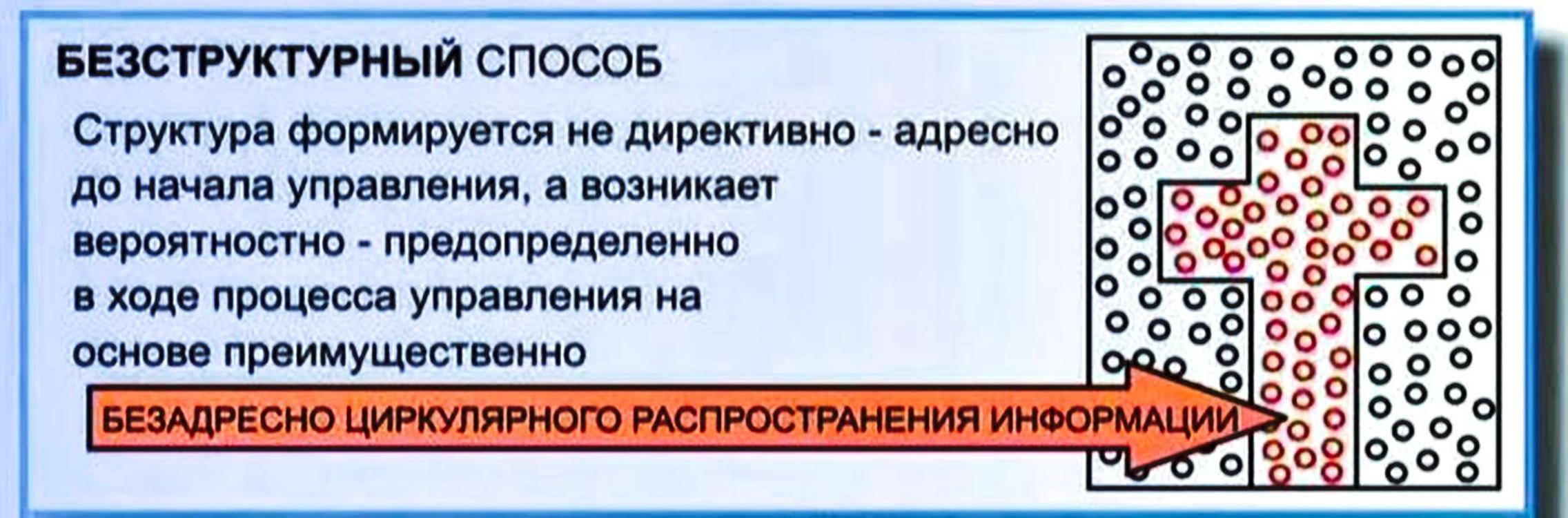
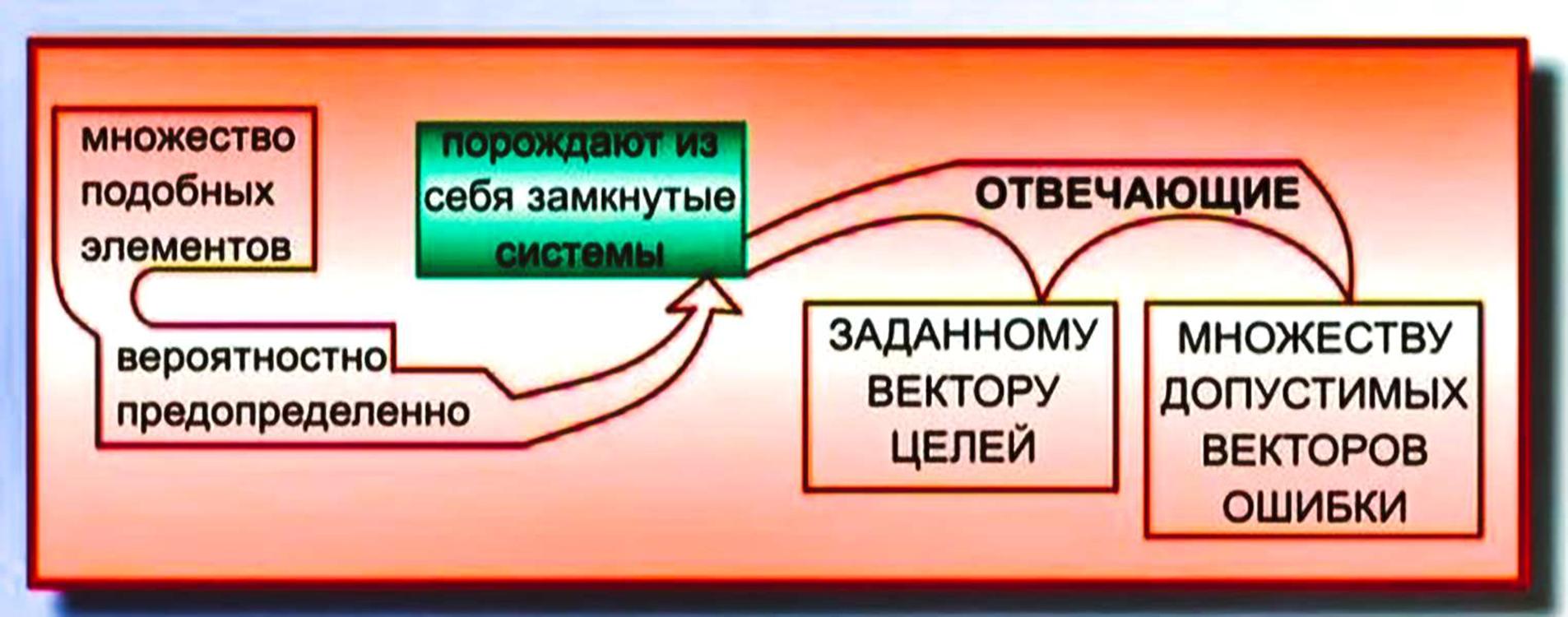
То есть, можно на определённом уровне считать производство билетов просто никчёмными издержками, которые понижают качество функционирования экономики. И на определённом уровне может быть ответ на вопрос такой, что не нужны ни кондукторы, ни билеты, а транспорт должен сидеть на госбюджете, и в целом для общества это меньшие издержки, нежели чем билеты и кондуктор. Но это требует уже реорганизации всей макроэкономической системы, потому что если система такая, какая она есть сейчас, то такой вариант невозможен. Но вот этот пример – это пример того, что можно назвать бесструктурный способ управления. При бесструктурном способе управления структуры не создаются целенаправленно. Они возникают сами собой вероятностно-предопределённым образом на основе той информации, которую элементы некоторого множества несут каждый в своей памяти.
При этом.
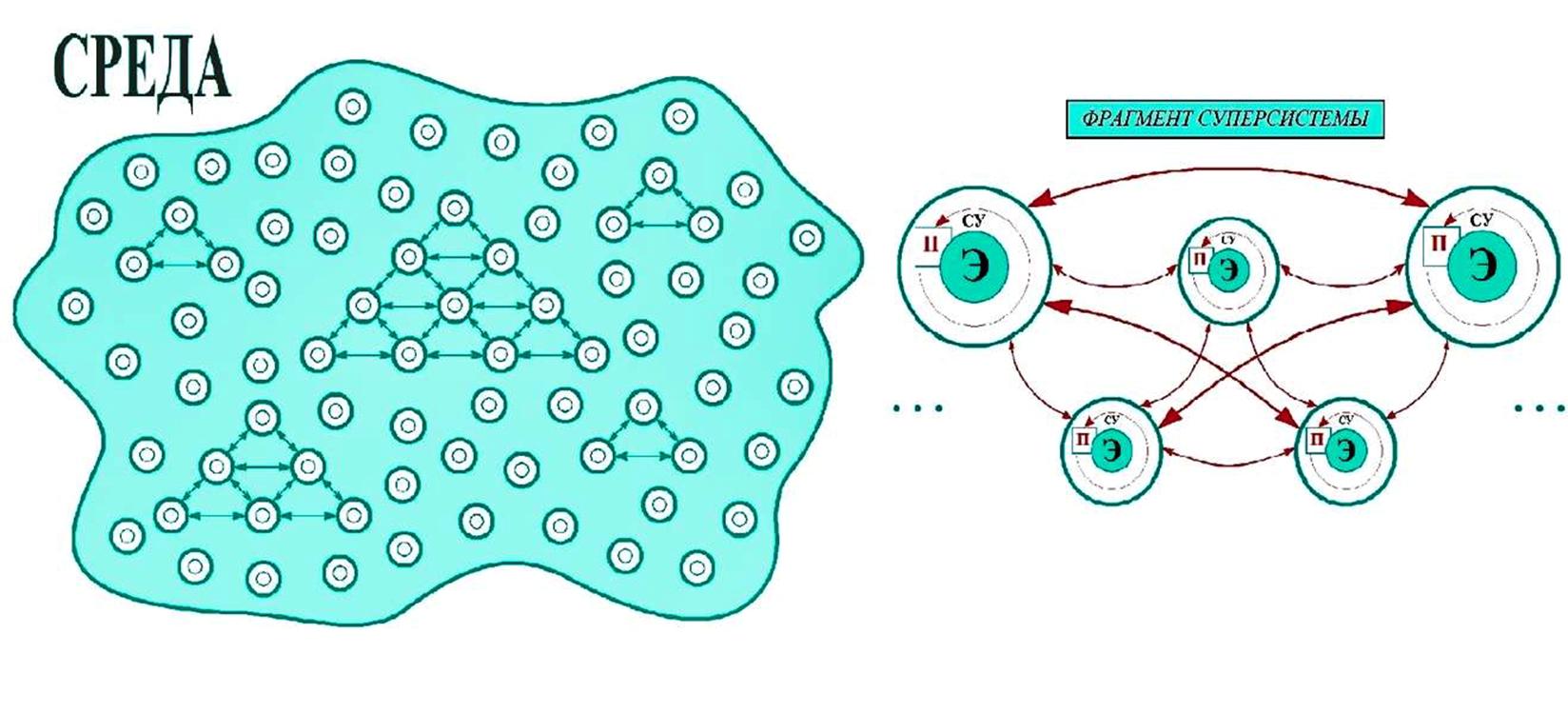
Если есть множество элементов, каждый из которых обладает несколькими характеристическими признаками, – он (элемент) обладает некоторой информацией и алгоритмикой в своей памяти, на основе которой строится его самоуправление. Он (элемент) может воспринимать информацию из внешней среды, и он может выдавать информацию во внешнюю среду. Вот если есть множество элементов, каждый из которых обладает этими тремя признаками: автономность памяти, способность к самоуправлению на её основе и способность выдавать и принимать информацию из внешней среды, то такое множество можно назвать суперсистемой.
По сути, суперсистема — это некое множество элементов, где каждый элемент способен к самоуправлению, он может принимать информацию, может её изменять и может её передавать как в начальном виде, так и в несколько изменённом виде. Следовательно, эти элементы могут быть взаимозаменяемы.
Ещё раз, суперсистема — это множество элементов, каждый из которых обладает тремя качествами:
- Он самоуправляется на основе того, что есть в памяти.
- Он может выдавать информацию в среду или другим элементам.
- Он может принимать информацию от других элементов в память, меняя своё самоуправление.
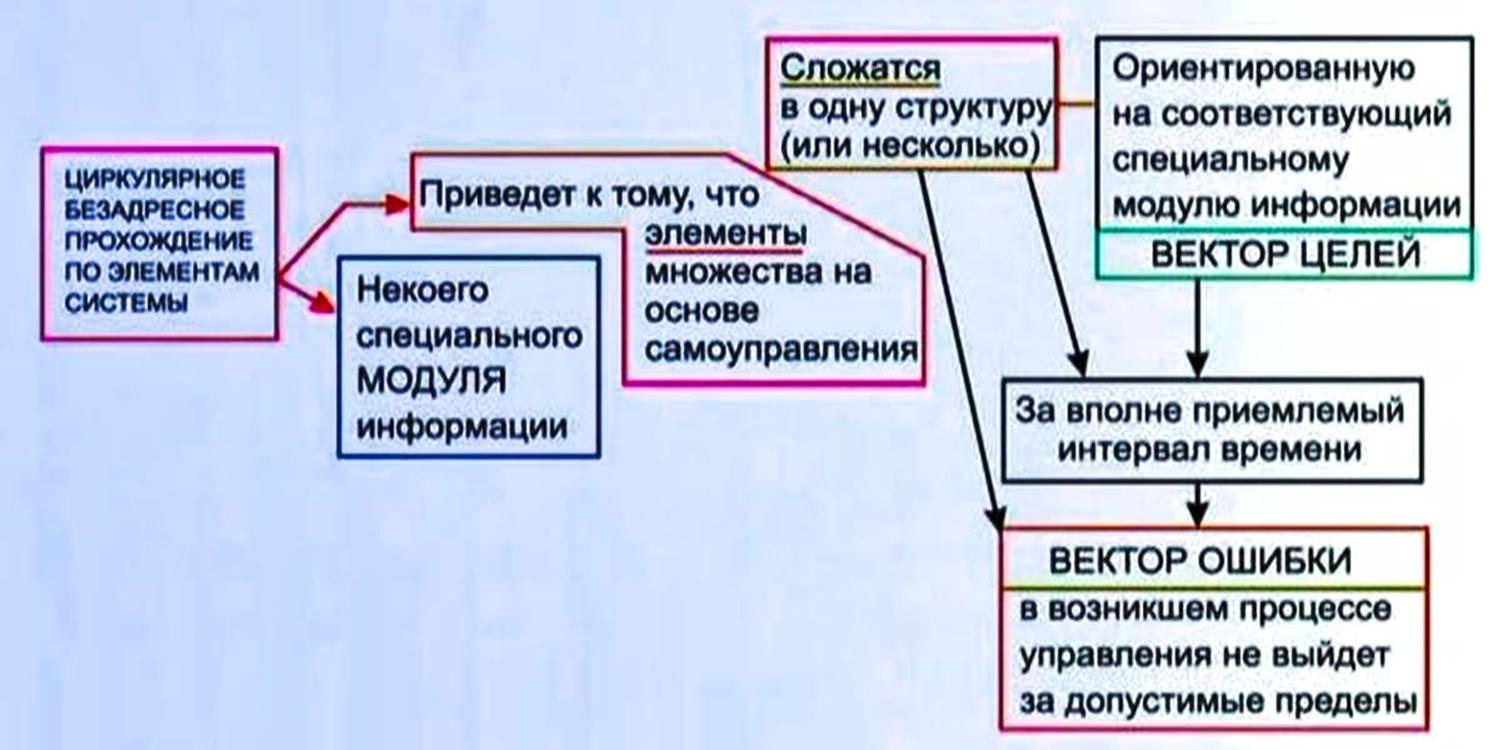
В суперсистеме, как в таковой, возможно осуществление так сказать бесструктурного управления. Это управление, которое складывается на основе распределения в обществе информации: адресной информации, адресованной каким-то элементам, каким-то подмножествам в этом множестве. Или распространение безадресной информации, которая распространяется просто в режиме – кто может принять, ну, те молодцы, кто не смог принять – это их дело.
Но вот как раз распространение правильно подобранной информации может предсказуемо вызывать возникновение структур, которые могут работать и решать поставленные задачи управления. Это и есть бесструктурный способ управления.
Если же вы имеете представление только о структурном способе управления и не имеете представления о бесструктурном способе управления, то вы будете воспринимать как неуправляемые и случайные процессы те процессы, которые реально являются управляемыми процессами.
Бесструктурное управление позволяет организовать, к примеру, биржевую панику. Бесструктурное управление позволяет управлять избирательными компаниями, и бесструктурное управление много чего ещё позволяет, если уметь им пользоваться.
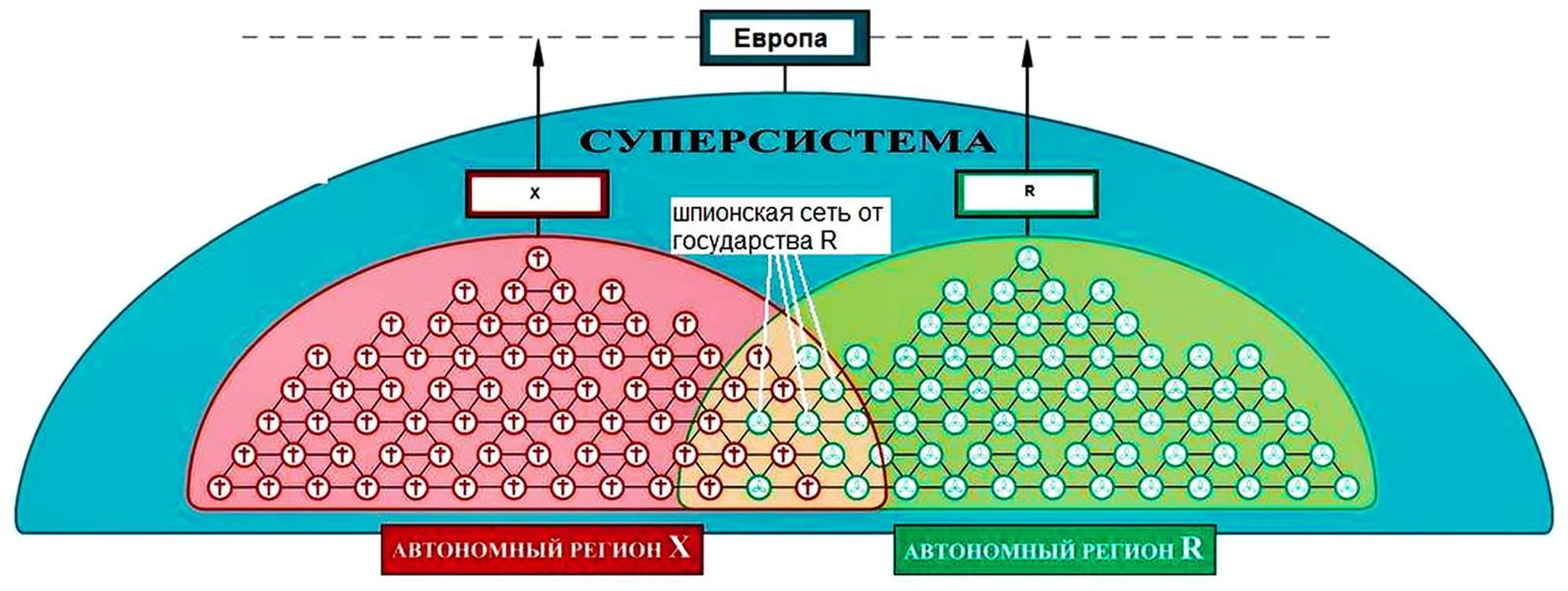
В суперсистемах возможно управление как структурным, так и бесструктурным способом. Но, кроме того, суперсистемы могут быть вложенными друг в друга по принципу матрёшки, т. е. одна суперсистема – это некое подмножество в другой суперсистеме. И, соответственно, элементы суперсистемы первой – это, в тоже самое время, элементы суперсистемы второй, её объемлющей. А вот не все элементы объемлющей суперсистемы являются элементами первой вложенной суперсистемы. В таких случаях возможны ситуации, когда из объемлющей суперсистемы во вложенную суперсистему проникает управление, основанное на структурном способе. Т. е. некоторое количество элементов суперсистемы, вложенной являются элементами структуры, построенной в объемлющей суперсистеме. А взаимоотношения между суперсистемами могут быть такими, что с позиций вложенной суперсистемы объемлющая суперсистема не видна.
Что тогда будет.
Тогда, если смотреть на ситуацию с позиции вложенной суперсистемы, вы увидите, что в какие-то моменты времени некоторые элементы суперсистемы, вложенной начинают беспричинно и без какой-либо взаимосвязи друг с другом действовать согласованным образом, в результате чего достигаются те или иные цели управления.
Вот это управление и есть управление на основе виртуальных структур.
Почему виртуальных структур?
Потому, что с точки зрения суперсистемы вложенной структуры не существуют, их нет. Но с точки зрения объемлющей суперсистемы структуры существуют, они есть. И они активизируются некими процессами из объемлющей суперсистемы.
При этом может происходить и динамическое перераспределение функциональной нагрузки между элементами вот в этой структуре. Поэтому с точки зрения одной суперсистемы структуры нет, а сточки зрения другой суперсистемы структура действует, и она активна.
Управление на основе действия виртуальных структур отличается от управления на основе бесструктурного способа и от управления на основе структурного способа, локализованного в пределах одной и той же суперсистемы и это отличие необходимо знать.
Примером управления на основе виртуальных структур является спящая сеть агентов вражеской спецслужбы. Все они выглядят как нормальные граждане одного государства, но наступает момент «Х», и они начинают проявлять активность в интересах другого государства.
Многие так сказать мистические явления в жизни общества и не понятные для большинства людей выражаются именно на основе управления виртуальных структур, но осуществляемого с иерархически высших, по отношению к обществу, уровней в организации мироздания. Такими уровнями являются Ноосфера планеты, которая, с точки зрения многих, не существует, потому что её нельзя увидеть воочию, нельзя пощупать руками или как, к примеру, Вседержительность Всевышнего, которая, для многих является предметом веры, либо предметом неверия.
Именно для полноты картины и полноты возможностей надо понимать, что управление возможно именно тремя указанными выше способами.
1. Структурный способ управления, когда структура выстраивается заблаговременно по отношению к началу процесса управления.

При этом управление предполагает:
1. Фрагментацию системы на более-менее самостоятельные модули.
2. Распределение единоличной персональной ответственности за каждый из модулей.
3. Распределение полномочий, которые позволяют ответственному выполнить работу, связанную с модулем.
4. Распределение ресурсов, которые необходимы для того чтобы каждый модуль был выполнен.
В тоже время, Управленец должен собирать всю возможную и необходимую информацию от объектов и субъектов управления относительно целей управления, на этой основе выявлять закономерности изменения получаемой информации, после чего он должен определить факторы ПРЕДСКАЗУЕМОСТИ их будущих изменений и уже исходя из этого, выдавать управляющие воздействия.
Если всё вышесказанное обеспечено, то управление осуществляется и задача решается.
2. Бесструктурное управление, когда структуры складываются статистически или вероятностно предопределённым образом, на основе той информации, которая есть в элементах суперсистемы под воздействием той информации, которая воздействует на элементы суперсистемы.
При этом однозначно соблюдается правило.
3. Управление на основе виртуальных структур, это управление, когда структуры де-факто есть, они некоторым образом сложились, а потом в нужный момент активизируются тем или иным способом.
Если у вас нет понятия об управлении бесструктурным способом и управлении на основе виртуальных структур, то многое из того, что является управляемым, на самом деле, для вас будет представляться как неуправляемое. И вы будете заложниками в той ситуации, в которой осуществляется бесструктурное управления или управление на основе виртуальных структур.
Наша задача заключается в том, чтобы исходя из уже имеющейся информации о векторе целей и векторе состояния, выявленной устойчивости в смысле предсказуемости, выбранном варианте из Шести приоратов управления и выбранной схемы управления из вариантов – Программное, Программно-адаптивное, Предиктор-Корректор. Определиться, каким способом лучше производить наше управление исходя из трёх имеющихся вариантов.
- Структурный способ управления.
- Бесструктурный способ управление.
- Управление на основе виртуальных структур.
Именно от выбранного варианта будут завесить и наши последующие шаги в формировании концепции управления.
Обо всех нюансах внедрении указанных способов управление будет рассказано в следующей главе /7. 3. 5. Внедрение концепции/
См. дополнительные пояснения.
Словарь:
/10. 18. 41. Структурный способ управления/
/10. 2. 5. Бесструктурный способ управления/
Литература:
/7108_Структурное и бесструктурное управление в обществе/
Видео:
/7181_Бесструктурное управление примеры/
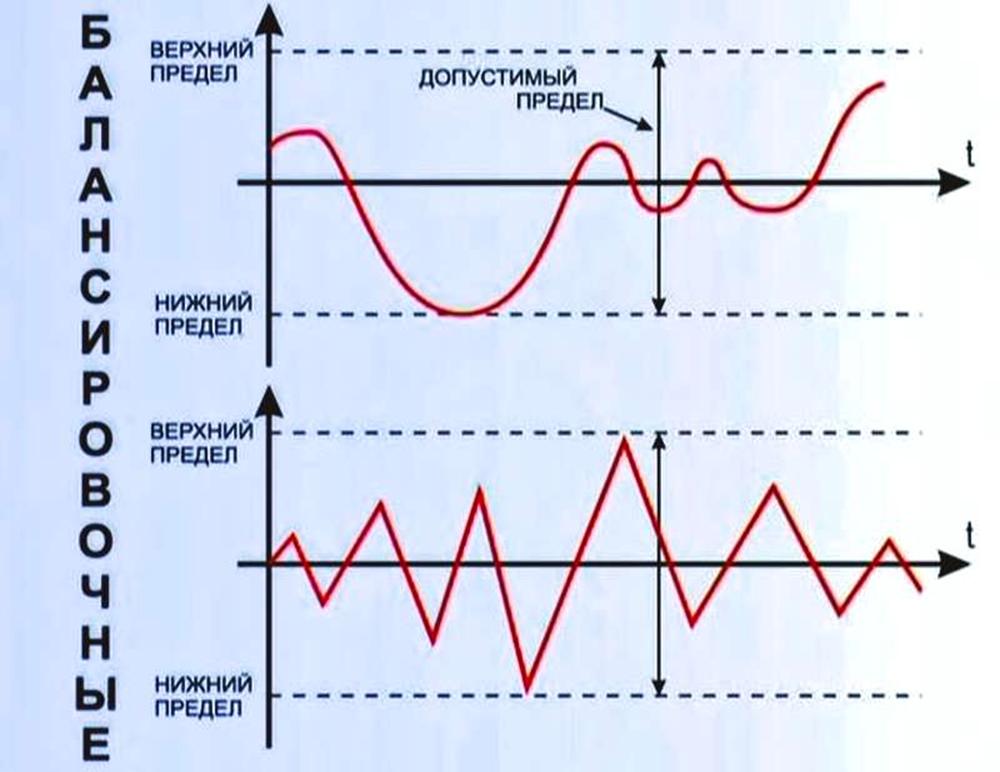
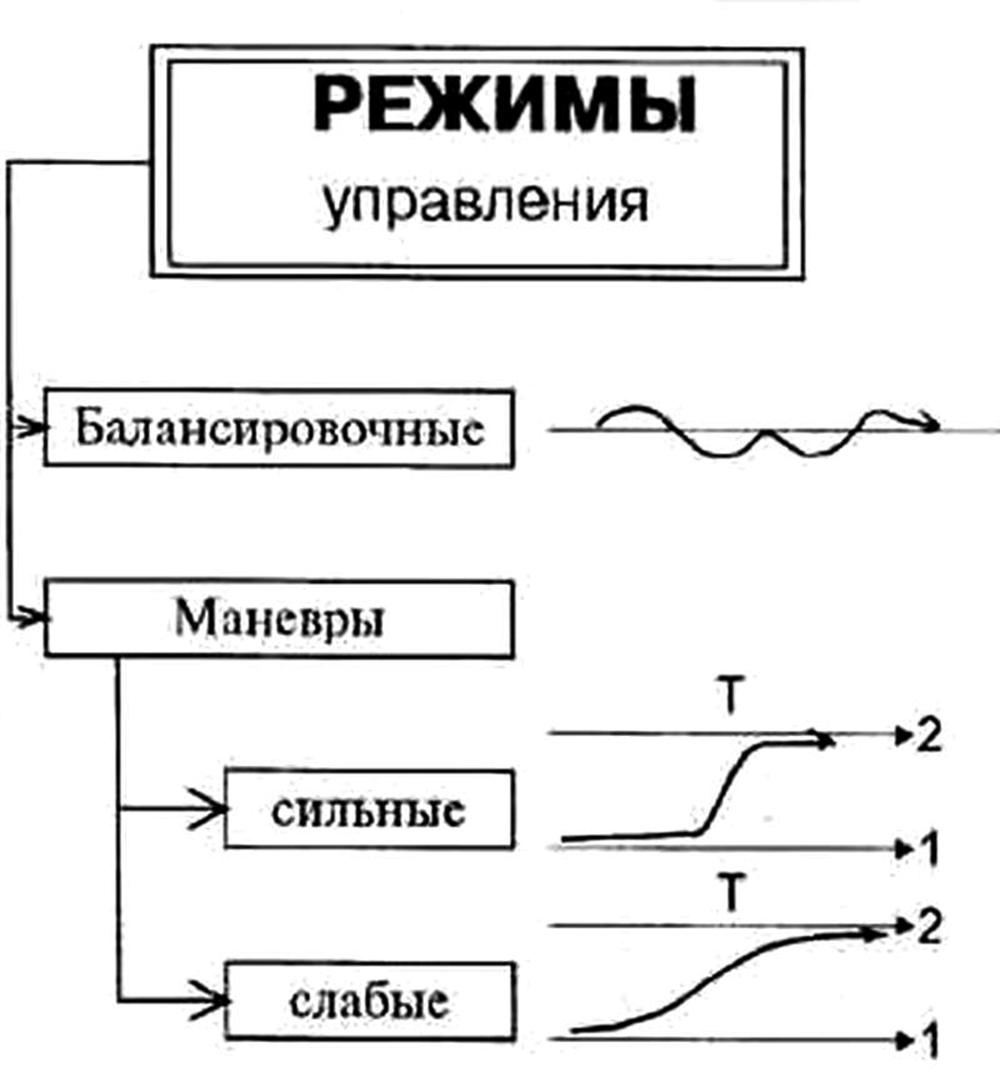
5. Выбор из вариантов режимов управления – Балансировочный, Манёвр.
Как определить балансировочный режим?
Ну, самое простое понятие – это статическое равновесие: маятник в нижней точке, шарик на горизонтальной поверхности.
Ну, а в динамике как?
В динамике тоже всё просто. Балансировочный режим – это неизменный во времени вектор цели управления, и практическое управление, когда вектор ошибки управления приближённо равен нулю с достаточной для практики точностью.
Примеры:
- Самолёт в полёте на неизменной высоте с неизменным курсом, который постоянно подстраивается под необходимое направление.
- Корабль, движущийся в море неизменным курсом и который также постоянно производит управляющие действия, чтобы не сбиться с курса.
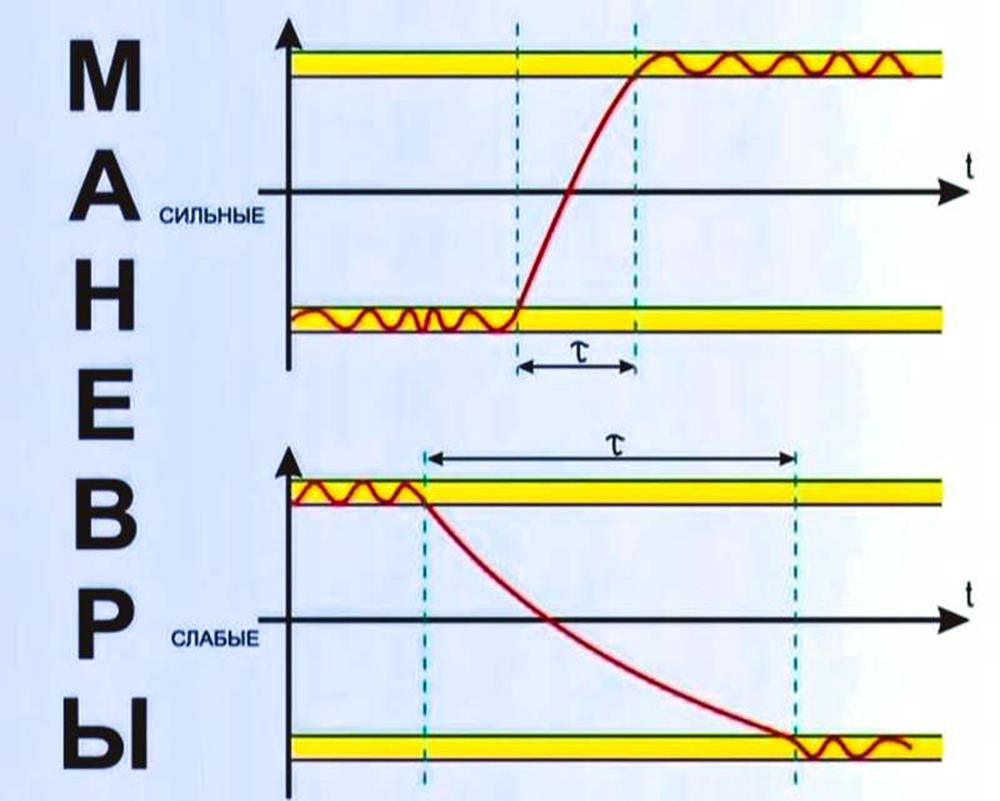
Ну, а что такое манёвр?
Манёвр – это переход от одного неизменного во времени вектора целей к другому вектору целей, который тоже неизменный во времени. Однако вектор целей у нас всегда субъективно определяется. И в векторе текущего состояния у нас довольно много параметров. Часть, из которых входит в вектор целей, который задан управляющим субъектом. А часть, из которых не входит в этот вектор целей.
Поэтому, с точки зрения стороннего наблюдателя, то, что является манёвром, может восприниматься и как балансировочный режим, если сторонний наблюдатель интерпретировал вектор целей управления иначе, а не так, как его задал тот управленец, который организовал процесс управления.
Поэтому один и тот же процесс, с точки зрения одного наблюдателя, может представать как балансировочный режим, а другой процесс, с точки зрения другого наблюдателя, тот же самый процесс, может представать как манёвр.
Например, у американцев есть модификация «Геркулеса» – самолёта С–130, которая несёт пушку. И компоновка самолёта такая, что обстрел может производиться только на один борт, поэтому тактика боевого применения строится на том, что Геркулес описывает циркуляцию вокруг целей и по ней стреляет.
Циркуляция вокруг целей – это манёвр или балансировочный режим?
В зависимости от того, как мы интерпретируем вектор целей – это балансировочный режим либо манёвр, хотя это один и тот же процесс, потому что если мы говорим –
вектор целей неизменен, и мы исключаем из вектора целей курс, то оказывается, что самолёт с неизменной скоростью, неизменными характеристиками обтекания летает по кругу, и в этом случае тот процесс, который характеризует параметры движения самолёта, – он предстаёт перед нами как балансировочный режим. Но если в вектор целей включаем курс, то в силу того, что самолёт летает по кругу, и курс непрестанно изменяется, этот же самый режим полёта предстаёт как манёвр.
Если очень грубо, то для осуществления управления надо выбрать некий параметр, на который можно влиять, выбрать нечто ТРЕТЬЕ, что может влиять на этот параметр и после этого исходя из целей, выбрать либо балансировочный режим, либо манёвр.
По сути, необходимо выбрать некий вариант регулирования. И он должен быть как нечто третье. То есть, надо выбрать инструмент, критерий, способ, фактор, через что осуществляется манёвр и происходит поддержание балансировочного режима общей системы. Надо определить его МЕРНЫЕ составляющие, чтобы управляемая система не вышла за рамки разрушения. В обыденной жизни это представляется в виде катастрофы и обрушение любого управления.
Если говорит образно, то УПРАВЛЯЮЩЕЕ ТРЕТЬЕ, вливаясь в «Огонь», может выступать и в виде «воды», и в виде «масла». В результате чего будет либо меньше огня, либо больше огня. При этом надо знать меру и естественно заранее знать все качества этого ТРЕТЬЕГО.
То есть, добавляя понемногу дров или воды в огонь можно осуществлять балансировочный режим поддержания необходимой температуры вокруг огня. В тоже время если необходимо изменить вектор целей, к примеру, нам понадобятся другие параметры, то мы можем добавить масла или другого горючего вещества, выйти через уже манёвр на другие параметры и после этого поддерживать их через знакомый нам балансировочный режим.
При этом надо всегда помнить о том, что существуют сильные и слабые манёвры. Различие в них в том, что слабые манёвры можно аккуратно отслеживать и при этом сама замкнутая система будет работать устойчиво. А вот при сильном манёвре, реакция системы может выйти за рамки возможного существования системы вообще. То есть, если мы добавим в костёр очень много горючего вещества, то костёр может перейти в фазу взрыва, тем самым вся система прекратит своё существование. То же самое происходит, когда, к примеру, самолёт очень резко заставят выполнить некий манёвр и его крепость сборки и жёсткость материалов, из которых он сделан, банально не выдержат нагрузки и самолёт развалится в воздухе.
По сути, надо учиться именно через интенсивность внедрения ТРЕТЬЕГО, через выявленные ранее соотношения, частоту, сдвиги по фазам и так далее нащупать тот режим, при котором управление будет наиболее устойчивым и предсказуемым исходя из выставленных ранее целей.
См. документ / 709_Режимы и манёвры /
В рекомендуемой литературе для 7 раздела
См. ролик /7180_Балансировочные режимы и манёвры с примерами /
В рекомендуемых видео для 7 раздела
6. Выбор области потенциально устойчивого, допустимого и качественного управления.
Этот пункт рассматривается на основе ранее проработанных параметров от первого пункта, где мы определяли Устойчивости в Смысле Предсказуемости.
Область изменения параметров окружающей среды и замкнутой системы, в которой замкнутая система (объект) устойчива в смысле предсказуемости поведения это область потенциально устойчивого управления.
Выход из неё ведёт к потере управления по непредсказуемости поведения.
Примером такого рода является гибель Героя Советского Союза лётчика-испытателя Г. Я. Бахчиванджи на первом советском реактивном перехватчике БИ-1 в 1943 г.
Произошло это от невнесения (не брали в расчёты) при конструировании в область необходимых параметров, зависимость изменения аэродинамических характеристик самолёта в полёте на большой скорости, от факторов изменения плотности воздуха.
То сеть, при проводимых испытаниях в аэродинамической трубе во время реального проектирования не было выявлено области изменения аэродинамических характеристик самолёта в полёте на большой скорости и соответствующих зависимостей.
Величина области потенциально устойчивого управления определяется не только характеристиками самого объекта и окружающей среды, но и характеристиками системы управления им. А это уже субъективный фактор предсказуемости. Что в ряде случаев позволяет обеспечить устойчивость течения процессов, объективно неустойчивых без управления, и (или) вызвать потерю устойчивости течения объективно устойчивых самих по себе процессов. В последнем случае объективная устойчивость и неустойчивость понимается в обычном смысле убывания отклонения возмущенного движения с течением времени после снятия действия возмущающего фактора.
Область потенциально устойчивого управления определяется в зависимости от привлекаемых к рассмотрению параметров.
Так, если из рассмотрения исключить прочность корпуса, то область потенциально устойчивого управления подводной лодки — весь диапазон глубин океана.
Но привлечение к рассмотрению характеристик прочности, ограничивает её глубинами нескольких сотен метров.
Внутри области потенциально устойчивого управления лежит область устойчивого (в обычном смысле) управления, ограниченная множеством допустимых векторов ошибки управления, — область допустимого управления.
Если формально пользоваться правилом трансформации вектора ошибки управления в оценку качества управления, то вследствие многомерности пространства параметров, в котором находится вектор, одному значению оценки качества управления могут соответствовать вектора ошибки как принадлежащие их допустимому множеству, так и находящиеся вне его.
Поэтому внутри области потенциально устойчивого и допустимого управления можно выделить область, в которой использование, принятого правила оценки качества управления, не приводит к выходу за пределы области допустимого управления.
Это область, безусловно, качественного управления или можно сказать нормального управления исходя из выбранной некой нормы качества.
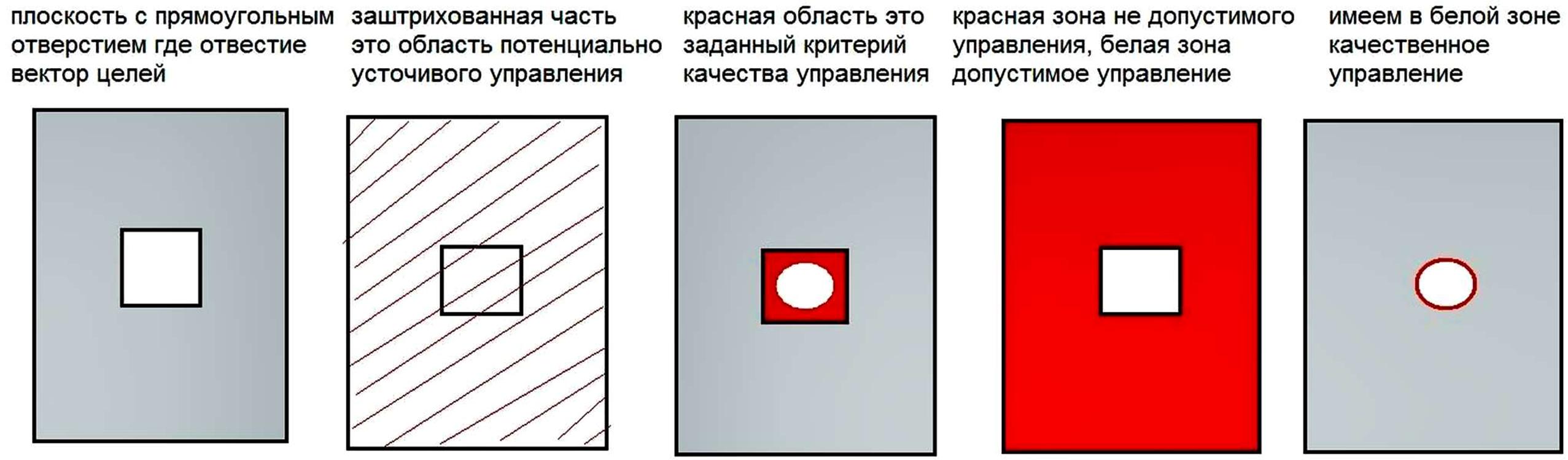
Пример, иллюстрирующий соотношение границ областей.
В прямоугольное отверстие на плоскости необходимо ввести манипулятор.
Область потенциально устойчивого управления — часть пространства, в котором находится поверхность с отверстием в пределах досягаемости манипулятора.
Зона допустимого управления — само прямоугольное отверстие.
Вектор целей — радиус-вектор центра отверстия в избранной системе координат.
Если оценка качества управления — расстояние от центра отверстия до внешней поверхности «руки» манипулятора, то зона безусловно качественного управления — круг, вписанный в прямоугольник.
Область — кольцо между вписанным и описанным кругами, это зона, где при одной и той же формальной оценке качества, управление может быть допустимым и недопустимым. Полное совмещение зон, безусловно качественного и допустимого управления требует построения иного правила преобразования векторов ошибки в оценку качества управления. Поэтому, если обеспечивается устойчивое, безусловно, качественное управление, то потеря управления в результате возмущающих воздействий — это последовательный переход из зоны, безусловно качественного управления в зону допустимого управления и из неё в зону потенциально устойчивого управления и выход их неё.
Попробуем объяснить похожий пример несколько, другими словами.
У нас есть плоскость с прямоугольным отверстием, в которую должен попасть тот же манипулятор. По сути, имеем цель в виде прямоугольного отверстия. Механизмы манипулятора позволяют ему попасть во все участки плоскости. Для нашей ситуации, мы выбрали критерием точности управления, допустим наименьшее приближение к стенкам отверстия в 2 мм. В результате у нас получился ниже нарисованный ряд определений.
Из всего вышесказанного видно, что наша цель будет недостигнута, когда наша система начнёт переход из зоны качественного управления в зону допустимого управления и далее в зону потенциально устойчивого управления.
Приведём очень простой и даже можно сказать грубый пример, но для выявления общего положения вещей его будет достаточно.
Допустим, нам необходимо выехать из некой деревни и добраться до города Хабаровск не позднее 18 часов вечера. Ранее в главе /7. 3. 3. Целеполагание/, мы для нашего вектора целей управления и для наших выбранных объектов выбирали:
- Контрольные параметры.
- Допустимы отклонения.
Где контрольные параметры — это параметры, за которыми необходимо следить, к примеру, скорость машины, запас бензина и так далее.
А допустимые отклонения — это предельные мерные значения контрольных параметров, за которые нельзя выходить, иначе срыв управления неизбежен, их лучше разграничить тремя вариантами.
- Возможные отклонения при нормальном качественном управлении.
- Возможные отклонения в условиях потенциально опасных обстоятельств.
- Возможные отклонения при аварийном управлении.
Так вот, в нашем случае с поездкой в Хабаровск мы имеем область Потенциально Устойчивого Управления (ПУУ) в виде радиуса от начала движения в любую сторону пока хватит бензина и других ресурсов машины и других возможностей. Выход за эту область приведёт к режиму аварийного управления и для этого мы определяли возможные аварийные параметры.
Далее мы имеем зону Допустимого Управления (ДУ), по сути это все дороги которые ведут в Хабаровск, следовательно, зона недопустимого управления — это все дороги которые не веду в Хабаровск. Так вот, выход за область Допустимого Управления приведёт нас к отклонениям в условиях потенциально опасных обстоятельств и для этого мы определяли возможные опасные параметры.
Если мы, к примеру, за хорошее качество достижения цели выбрали критерий возможного опоздания не более чем в 15 минут, то тем самым мы выбрали критерий качества управления. В результате чего мы получили зону Качественного Управления (КУ) в виде проезда по некой дороге до города Хабаровск на машине с достижением цели не позднее 18 часов 15 минут. Выход за это условие приведёт нас к ненормальному, некачественному управлению. В нашем примере, критерий качества управления заданный в 15 минут, есть ничто иное как возможное допустимое нормальное отклонение.
По большому счёту вход в зону недопустимого управления и создания вектора ошибки управления, возможен в результате двух причин:
- Во-первых, сама, устойчиво функционирующая замкнутая система представляет собой колебательную систему. Поэтому даже в условиях заведомого отсутствия внешних возмущений она совершает колебания относительно вектора целей. Вопрос только в том, позволяет ли постановка задачи управления пренебречь этими колебаниями, либо же нет. Следовательно, надо всегда знать об этом и имеет это в виду при формировании концепции управления и выборе контролируемых параметров.
- Во-вторых, на замкнутую систему действуют внешние возмущения из окружающей среды, а в ней самой могут происходить какие-то внутренние изменения. К примеру, самолёт расходует топливо в полёте, в результате чего алгоритмика управления им, применяемая при полных баках, будет ошибочной, если её применить при управлении, когда на борту останется минимальный запас топлива. Этот эффект становится ещё более ярко выраженным, если самолёт в полёте сбрасывает груз (большой по отношению к его максимальной взлётной массе). Это касается бомбардировщиков, ракетоносцев, танкеров-заправщиков, пожарных.
Так же следует обратить внимание на понятие «запас устойчивости замкнутой системы». Это, по сути, собственная характеристика замкнутой системы, построенная на основе какой-либо (их может быть несколько) меры возмущающего воздействия, превышение которой ведёт к выходу вектора ошибки управления за допустимые пределы или к гибели системы.
По сути, запас устойчивости системы предстаёт как общая численность её элементов, не используемая в данный момент для достижения цели.
Если говорить грубо, то это ресурс, к примеру, машины который существует в запасе и который не предполагается расходовать для достижения цели.
Наша задача заключается в том, чтобы для выбранных ранее режимов и способов управления метрологически состоятельно определить:
- область потенциально устойчивого управления.
- область допустимого управления.
- область нормального качественного управления.
- запаса устойчивости по основным возможным критическим и возможным аварийным параметрам.
После того как мы определились с выше указанными областями, теперь мы можем, так сказать, и определиться и с соответствующими векторами целей.
То есть, мы можем исходя, из нашего ранее выбранного вектора целей и всех подцелей произвести анализ всех параметров и прийти к некому обоснованному выбору относительно областей управления.
По сути, нам надо выбрать Вектор управляющего Воздействия в таких рамках, дабы он оставался в области качественного управления и не переходил в дефектный вектор управления, который исходя из заданных условий, может попадать в область допустимого, потенциального или аварийного управления. Подробнее о Векторе Управляющего Воздействия будет рассказано далее по тексту.
К примеру, Потенциальный Вектор Целей — совокупность целей, на которые в практической деятельности не работает никакая алгоритмика, но которые объективно возможны для рассматриваемой системы в качестве целей её деятельности либо в неопределённом будущем, либо при возникновении определённых провоцирующих обстоятельств. Следовательно, если нас это не интересует именно сейчас, то из всего нашего набора вектора Целей и подцелей надо исключить всё, что относится к этому.
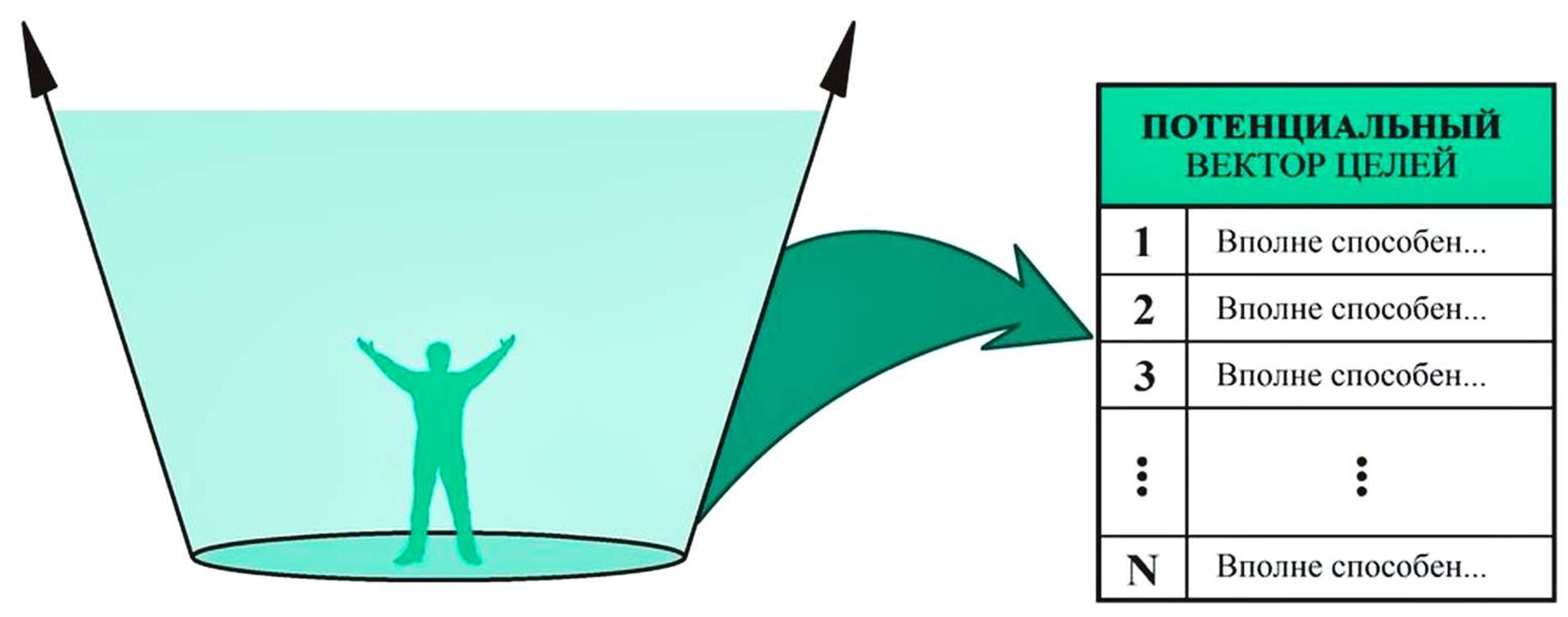
Если говорить проще, то потенциальный вектор целей, содержит объективные возможности, не используемые по субъективным причинам. К примеру, человек может в принципе прыгнуть выше своего роста, но сейчас нам не надо тренироваться, чтобы этого достичь.
См. практику в соответствующем параграфе № 6 Выбор области потенциально устойчивого, допустимого и качественного управления, в главе:
/7. 4. 6. ПФУ 4 формирование концепции/
7. Выбор Вектора Управляющего Воздействия.
Вектор управляющего воздействия это, грубо говоря, те рычаги, через которые мы влияем и на которые воздействуем для реализации цели. Это те параметры, на которые мы можем влиять и которыми можем управлять, по сути это управляемые параметры.
В самом начале мы имеем естественно начальные параметры.
Впоследствии управляющие воздействия изменяются, при каждом новом измерении Вектора Текущего Состояния.
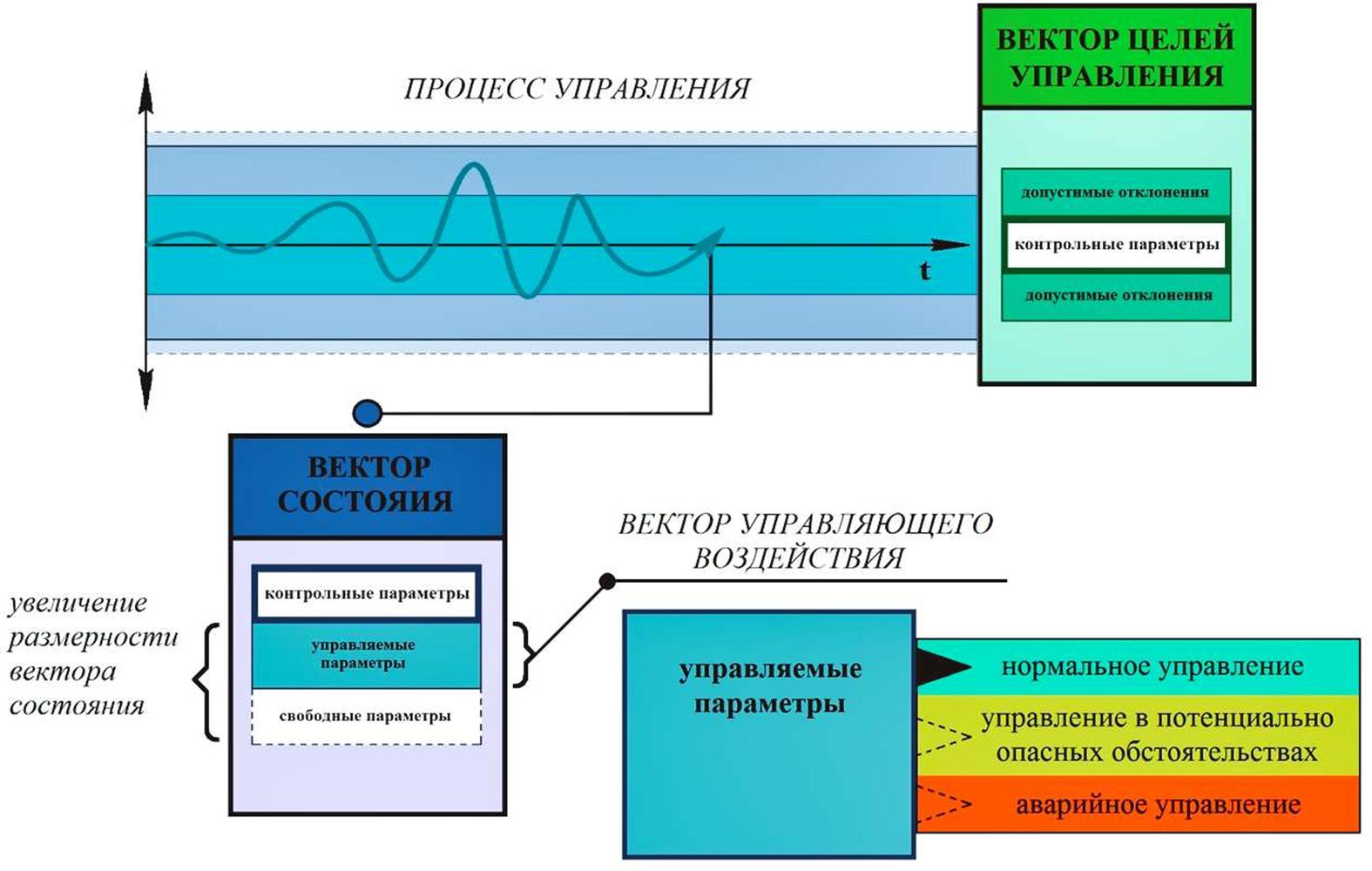
В главе /7. 3. 3. Целеполагание/ мы уже выбирали вектор целей и вектор состояния.
И соответственно выбирали для них некие начальные параметры.
Теперь нам необходимо, обобщить всё, что мы делали выше в предыдущих пунктах этого текста, т. е. снова пробежаться по всем пунктам и, исходя из того, что мы выбирали, нам надо выбрать управляемые и свободные объекты и все контрольные параметры. После чего надо сформировать Вектор Управляющего Воздействия и все необходимые параметры для этого.
Изначально надо всегда исходить из всех контрольных параметров и их допустимых отклонений, в которые входят.
- Управляемые параметры.
- Свободные параметры.
По сути, делаем список главных объектов управления исходя из вектора целей, и выводим для них контрольные параметры, а из них выделяем управляемые параметры, из которых и будет формироваться вектор управляющего воздействия, именно то, через что мы реально будем управлять.
То, как мы влияем на доступные нам контрольные параметры, через их возможное изменение и есть вектор управляющего воздействия.
К примеру, чтобы не воняли носки в 9 часов утра, будет вектор управляющего воздействия в виде – надо …, если через час проверим, и снова воняет, то будем стирать ещё раз исходя из проведенного анализа параметров, на которые мы можем повлиять и через которые можем управлять. К тому же, мы обязательно должны определиться со всеми необходимыми контрольными параметрами, дабы мы могли отслеживать, как проходит наше управление и наше влияние. Кстати именно поэтому нам здесь так же нужны и свободные параметры, дабы не упустить из виду ситуации, когда они могут повлиять на ход нашего управления.
Ещё раз – контрольные параметры разделяются на две категории:
- Управляемые параметры, — которые могут быть непосредственно изменены воздействием со стороны субъекта. Что повлечёт за собой и изменение контрольных параметров. В изменении значений непосредственно управляемых параметров выражается управление, по сути, они образуют вектор управляющего воздействия.
- Свободные параметры, — которые изменяются при изменении непосредственно управляемых, но не входят в перечень управляемых контрольных параметров, составляющих вектор целей управления. Все объективно возможные значения свободных параметров в процессе управления признаются допустимыми.
Так, для корабля: угол курса — контрольный параметр.
В него входит:
- угол перекладки руля — (непосредственно) управляемый параметр;
- угол дрейфа (между вектором скорости, т. е. направлением движения в текущий момент времени и плоскостью симметрии корабля, называемой диаметральной плоскостью) — свободный параметр.
Или другой пример: для систем «искусственного климата» управляемым контрольным параметром может быть температура воздуха в помещении, а относительная влажность воздуха в нём может быть свободным параметром. Включение относительной влажности воздуха в список управляемых контрольных параметров потребует дополнения системы устройствами поглощения избыточной влаги и увлажнения чрезмерно обезвоженного воздуха.
Поэтому, под реальным вектором состояния следует понимать в большинстве случаев этот расширенный вектор, включающий в себя вектор текущего состояния контрольных параметров, повторяющий иерархическую упорядоченность вектора целей.
Набор непосредственно управляемых параметров может быть также иерархически упорядочен (нормальное управление, управление в потенциально опасных обстоятельствах, аварийное и т. п. ) и образует вектор управляющего воздействия, выделяемый из вектора состояния, и потому вторичный по отношению к нему.
При этом, в зависимости от варианта режима управления некоторые из числа свободных параметров могут пополнять собой вектор управляющего воздействия и соответственно вектор целей.
Хочется отдельно отметить контрольные объекты и контрольные параметры, которые возникают в ситуациях, когда наше управление идёт вразрез с интересами других людей. В этом случае, так сказать, эти интересы и их возможные проявления через влияние на нас, в виде отрицательных действий, необходимо всегда заранее вычислять. И обязательно вносить либо в управляемые параметры, если мы можем так сказать повлиять на наших врагов, либо в свободные параметры, если повлиять пока не можем.
Ещё раз запомним. То, как мы влияем на доступные нам контрольные параметры, через их возможное изменение и есть вектор управляющего воздействия.
Наша задача выявить такие параметры и найти способ их изменения.
См. практику в соответствующем параграфе № 7 Выбор Вектора Управляющего Воздействия в главе:
/7. 4. 6. ПФУ 4 формирование концепции/
8. Формирование Концепции Управления
Для понимания сути, попробуем очень грубо обобщить основные этапы управления.
В самом начале есть что-то, что нам мешает и что заставляет, мягко говоря, «шевелиться». Относительно этого возникает некое желание что-то предпринять. Далее это желание оформляется в цель, затем составляется вектор целей, и собираются данные о векторе состояния. Затем намечаются некие возможные действия по достижению цели, относительно того, что мы хотим и что имеем на данный момент. После чего выбираем способ достижения и контроля цели, т. е. способ движение оттого, что есть, к тому чего хотим. В итоге всего этого мы начинаем действовать, то есть, управлять и реализовывать управление. В процессе управления информация о векторе состояния соотносится с вектором целей и на основе этого определяется вектор ошибки по контрольным параметрам. Исходя из уровня вектора ошибки, вырабатывается новый вектор управляющего воздействия и осуществляется следующий управляющий цикл. И так до реализации цели и ликвидации фактора, который на нас давил ранее.
По большому счёту мы занимаемся формированием некой модели, отрабатывая которую мы ликвидируем влияние фактора среды, который на нас давит.
Так вот Концепция Управления – это как некое описание, это как некая вот такая модель, через реализацию которой мы добиваемся процесса обнуления вектора ошибки управления, что и позволяет нам разобраться с неприятным фактором среды.
Формирования той или иной концепции управления – это всегда конкретика, конкретика той предметной области, к которой принадлежит частный процесс управления, и конкретика взаимодействия этого частного процесса управления с окружающей средой.
Если говорить очень простым языком, то для формирования концепции управления нам необходимо иметь вектор целей и вектор состояния и начальный вектор ошибки.
Когда мы формировали вектор целей, мы главную цель разбивали на подцели. Теперь нам необходимо каждую подцель прогнать по всем пунктам, которые мы проходили выше.
По сути, мы должны наполнить нашу таблицу которую мы заполняли в главе
/7. 3. 3. Целеполагание/ определенной конкретикой с пояснениями.
То есть надо осуществить:
- Определение Устойчивости в Смысле Предсказуемости.
- Выбор средств управления исходя из Шести приоратов управления с выбором между управлением и самоуправлением.
- Выбор схем управления из вариантов – Программное, Программно-адаптивное, Предиктор-Корректор
- Выбор способов управления из вариантов – Структурное, Бесструктурное, Виртуальное.
- Выбор режимов управления из вариантов – Балансировочный, Манёвр.
- Выбор области потенциально устойчивого управления и устойчивого управления
- Выбор Вектора Управляющего Воздействия и выбор необходимых контрольных и свободных параметров.
В результате чего мы получим некий список контрольных параметров и способов с ними работы, дабы подцели реализовывались до приемлемого варианта.
После чего этот список необходимо подчинить некой иерархии исполнения по необходимому параметру. В большинстве своём это время и достижение положительного результата.
К примеру, нам надо доехать до Хабаровска. Чтобы это осуществить мы должны выполнить ряд действий, которые должны идти строго друг за другом. Подготовить деньги, выбрать маршрут, выбрать транспорт, купить билет, собрать необходимые вещи.
По большому счёту у нас должен получиться некий перечень подцелей с соответствующим перечнем частных концепций реализации подцелей с контрольными параметрами, их ещё называют частными целевыми фикциями управления.
Вот этот упорядоченный перечень и есть Концепция Управления.
См. практику в соответствующем параграфе № 8 практика Формирование Концепции Управления в главе: 7. 4. 6. ПФУ 4 формирование концепции
Небольшой вывод:
Формирование концепция достижения целей, в подавляющем большинстве случаев, – это очень сложная тема. Посторенние концепции достижения целей требует личностной познавательно-творческой культуры, потому что если этой познавательно-творческой культуры нет или она не адекватна, то цели для вас могут быть желанны, понятны, но вы никогда не сможете предвидеть тот процесс, в результате которого эти цели будут достигнуты. Ну, и соответственно, в этом случае вы оказываетесь в ситуации, описываемой басней «Лиса и виноград».
Да, цели хороши, всё прекрасно, но будет отговорка – «Зелен».
Но кто зелен? Виноград или вы?
Вы не дозрели для того, чтобы сформировать концепцию управления.
И вот если вы не дозрели, то это в ряде случаев беда не только вас, но беда и окружающих, потому что если некому сформировать концепцию управления, то задача управленческая не будет поставлена и не будет решена.
И посмотрите вокруг. В основном публичные политики болтают о том, какие цели надо поставить, но мало, когда говорят о том, как эти цели достигаются.
Почему?
А вот именно поэтому – личностная познавательно-творческая культура не позволяет им сформировать концепцию достижения целей. Если концепции достижения целей нет, то, конечно, можно рулить, молча по наитию. Но, чтобы рулить по наитию, надо обладать ещё более высокой познавательно-творческой культурой и личностной культурой психической в целом деятельности. Так как такое управление, это результат очень высокой внутренней социальной организованности под неким всеобъемлющим управлением, цели которого ясны и понятны всем, а каждая частичка несёт не только решение своей задачи, но и решение общего. К примеру, надо уметь организовать социальное управление на таком уровне, как осуществляют его термиты. Когда просто разделяют группу термитов стеклянной стенкой, и они начинают строить термитник. И если потом, по завершению процесса, убрать стеклянную стенку, то входы и выходы правой и левой половины совпадут и будут там, где надо.
Вот такая координация деятельности должна быть и в человеческом обществе. Когда деятельность многих разных людей, находящихся в разных местах, и действующих подчас вне взаимного общения друг с другом приводит к одним целям.
Но на данный момент, притом уровне развития культуры, которая есть сейчас, такой вариант в подавляющем большинстве случаев невозможен.
И вот именно для того, чтобы организовать коллективную деятельность в нужном режиме и требуется концепция управления, с которой бы могли ознакомиться разные люди и могли бы найти каждый своё место. Найти каждый своё дело, и делать своё дело так, чтобы его дело дополнило дела других людей в неких общих процессах.
Причём вот это формирование концепции управления, – оно касается всех проблем без исключения разного масштаба. От проблем ликвидации глобального биосферного социально-экологического кризиса, до проблем устойчивого функционирования предприятия на рынке в течение длительного времени и позволяющего его работникам жить и счастливо решать все проблемы обеспечения жизни своей семьи.
Всё упирается в концепцию управления, в её адекватность обстоятельствам реализации, в адекватность объемлющим процессам и перспективам их развития.
Если вы формируете некую концепцию достижения частного вектора целей, то вы должны аккуратненько его уложить в концепцию течения и самоуправления, либо управления объемлющими процессами. Если вы этого сделать не сможете, то тогда ждите неприятностей в процессе управления – от менее высокого качества управления, до полного краха того процесса управления, который вы затеяли. То есть, к примеру, ели вы не учитываете местные законы, менталитет окружающих людей для которых вы что-то делаете или, к примеру, грубо действуете против законов природы, то любая ваше деятельность будет обречена на неудачу в обязательном порядке.
См. практики в соответствующих параграфах в главе:
/7. 4. 6. ПФУ 4 формирование концепции/
См. дополнительные пояснения.
Литература:
/767_Модельный закон о прогнозировании СНГ/ - Очень хороший перечень по формированию контрольных показателей и целевых функций управления для современной России можно увидеть в конце документа.
Обидно, что такой труд не будет востребован, даже в ближайшее время.
Видео:
/7169_12. Суперсистемы. Процессы, протекающие в них/
/7170_13. О концентрации управления в суперсистемах. (часть I)/
/7171_14. О концентрации управления в суперсистемах. (часть II)/
/763_оценка качества управления_mpeg4/
Следующая страница ➤

Данилёнок Вадим Евгеньевич
С этого места Вы можете бесплатно скачать книгу по материалам сайта и выразить благодарность автору по указанной ссылке
СКАЧАТЬ КНИГУ БЕСПЛАТНО
или нажав на верхнюю картинку
* * * * * * * * *