7. 4. 6. ПФУ 4 формирование концепции
Формирование концепции управления.
Ещё раз читаем главу /7. 3. 4. Формирование концепции/.
Все ниже приведенные практики — это разбор соответствующих пунктов в этом документе.
1 практика
Устойчивость по Предсказуемости
Если говорить полным образом, то имеем длинный термин – Устойчивости объекта управления в смысле предсказуемости его поведения в определённой мере под воздействием внешней среды, внутренних изменений и собственно управления.
Кратко – это Устойчивость по Предсказуемости.
Проистекает этот термин из того обстоятельства, что если вы не в состоянии предсказать развитие ситуации с достаточной для вас точностью, то вы не можете организовать управление в принципе.
Так шофёр способен управлять автомобилем вследствие того, что заранее знает, предвидит, предощущает, как и в течение какого интервала времени, машина отреагирует на его предумышленные манипуляции с органами управления.
Если вы не умеете водить машину или она внезапно серьёзно разрегулировалась, то её реакция на ваши действия непредсказуема для вас и в этом случае, для вас автомобиль — неуправляем.
Если говорить грубо, то всё сводится к тому, чтобы научные знания, к примеру, теория вероятности и некие статистические данные, совместно во всем имеющимся опытом позволили бы вам построить некую модель процессов поведения нашего объекта. Далее, работая с этой моделью в темпе, опережающем реальное течение событий, вы уже можете предвидеть будущее поведение объекта. В дальнейшем, модифицируя объект или связанные с ним другие объекты, вы можете добиться от него приемлемых для вас эксплутационных характеристик.
На начальном этапе мы уже определяли необходимую степень возможного воздействия и возможной управляемости фактора среды, который давит и степень предсказуемости его поведения как такового. То есть, мы определялись на тот счет, что выявленный нами фактор среды, управляем ли он вообще и можно ли, хоть как-то предсказать его изменения, от возможных воздействий на него и вообще его любые изменения. Именно ответив на эти вопросы, мы делали начальные прогнозы:
- Либо нам пытаться управлять, воздействуя на сам фактор среды, выявляя способы воздействия (нападать).
- Либо организовывать защиту от вредных всевозможных воздействий и приспособиться к фактору среды (защита).
- Либо остановить любые действия и банально игнорировать фактор среды, но, не забывая получать дополнительную информацию (замереть и ждать).
По сути, это самый первый этап определения устойчивости в смысле предсказуемости.
Мы как бы предполагаем, как может устойчиво развиваться весь процесс в будущем, исходя из трёх основных направлений.
- Мы воздействуем некими способами на проблему, и предположительно будет желаемая ответная реакция.
- Мы защищаемся от проблемы и от её следствий, и предположительно будет достигнут желаемый результат.
- Мы ничего не делаем, следим за ситуацией, и предположительно будет то, что мы ожидаем.
Если относительно любого объекта мы не можем предсказать его поведение исходя из выше указанных моделей, то это означает его неуправляемость в принципе такого объекта. Следовательно, браться за его управление нет вообще смысла, пока не будет собрана дополнительная информация и не будут найдены способы воздействия на него, вследствие чего не возникнет необходимый для нас фактор прогноза его поведения.
По большому счёту, пункт 1 и пункт 2 это работа с управляемыми параметрами и управляемыми объектами, а пункт 3 это ситуация со свободными параметрами и свободными объектами.
Теперь приступим к тренировкам.
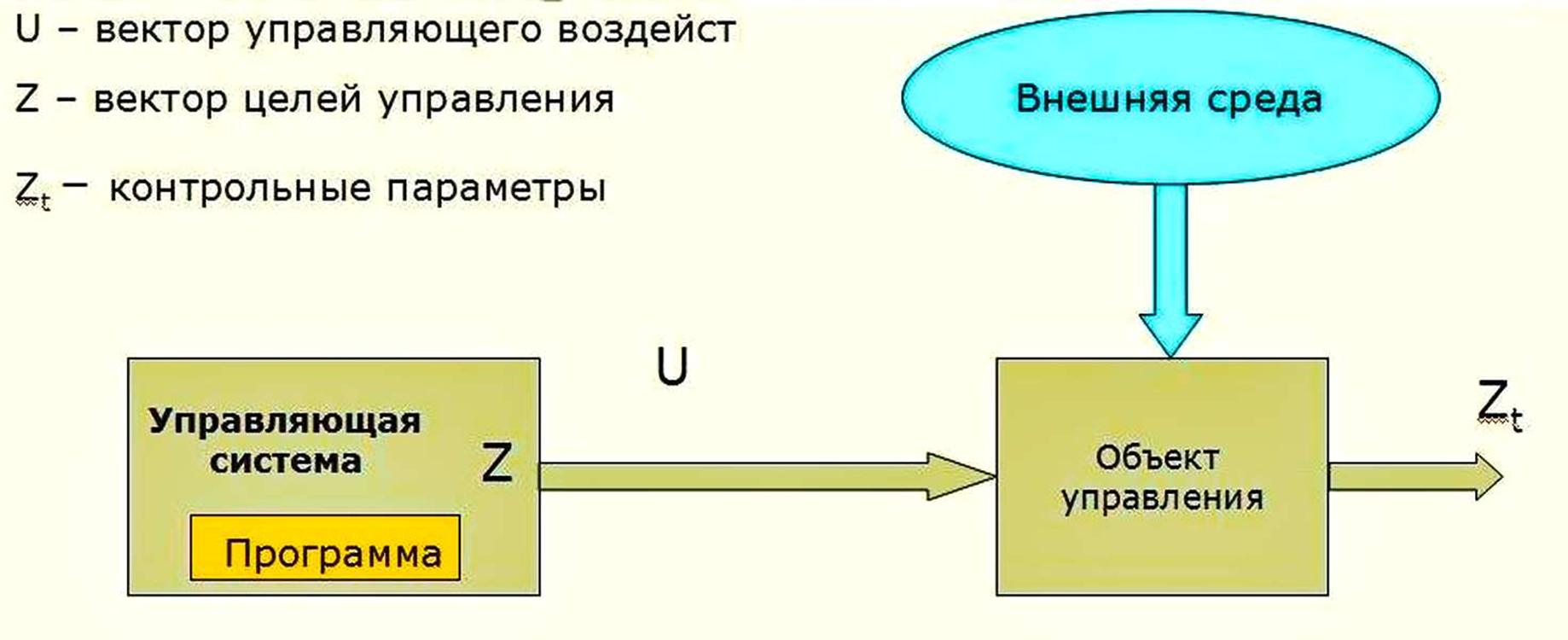
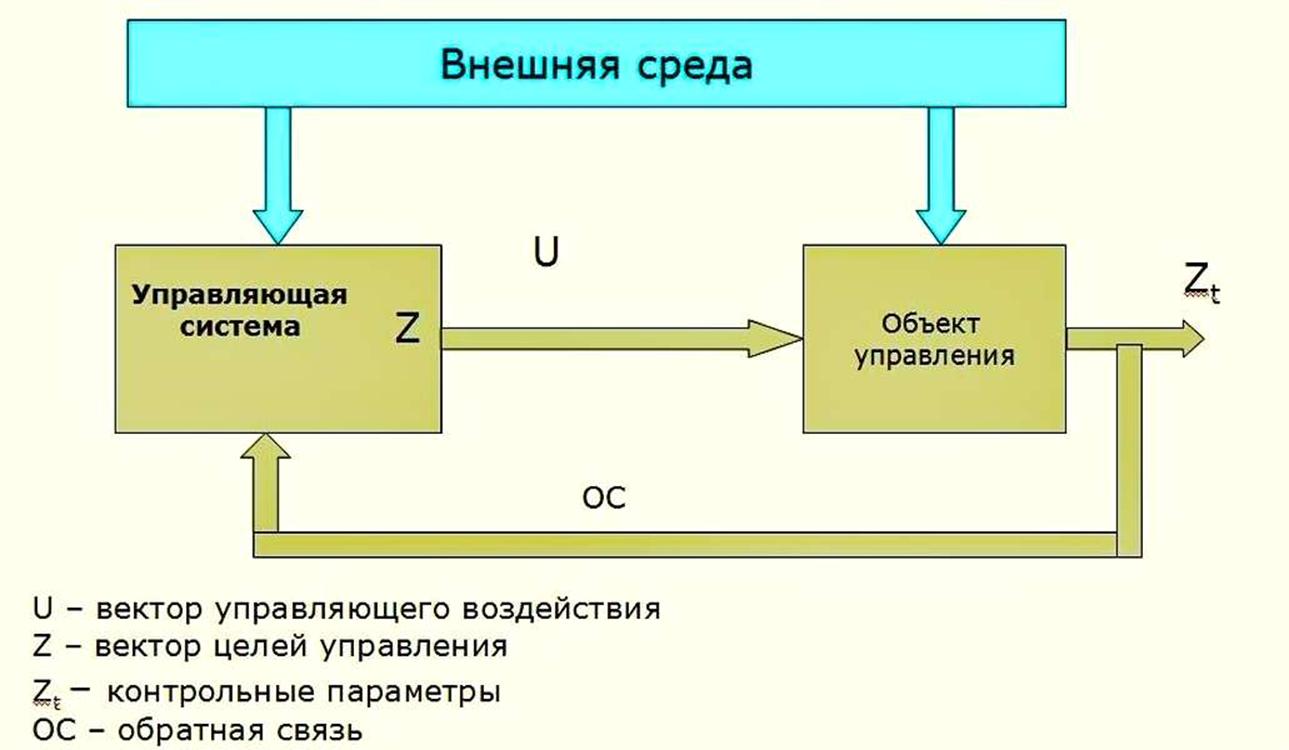
В самом начале нам необходимо выделить замкнутую систему управления, после чего её зарисовать и подписать основные, так сказать, «действующие лица». Или лучше сказать основные объекты, субъекты и связи.
По сути, нам необходимо определиться с субъектом управления, объектом управления, прямой связью и обратной связью. В последних, необходимо, так сказать, назначить положительные обратные связи и отрицательные, исходя из сложившихся условий, к которым мы подошли после выполнения третьего пункта ПФУ – Целеполагания.

Смотрим ранее составленный наш вектор целей и вектор состояний, где мы определялись с целями, подцелями, управляемыми параметрами, свободными параметрами, контрольными параметрами. См. главу /7. 4. 5. ПФУ 3 целеполагание/.
Для самого начала нам надо нарисовать 40 картинок для каждого фактора среды, который давит и с которыми мы работали ранее. Подписать все действующие части. К примеру, для фактора среды который давит как – «воняет от ног» это буде выглядеть как на рисунке ниже.
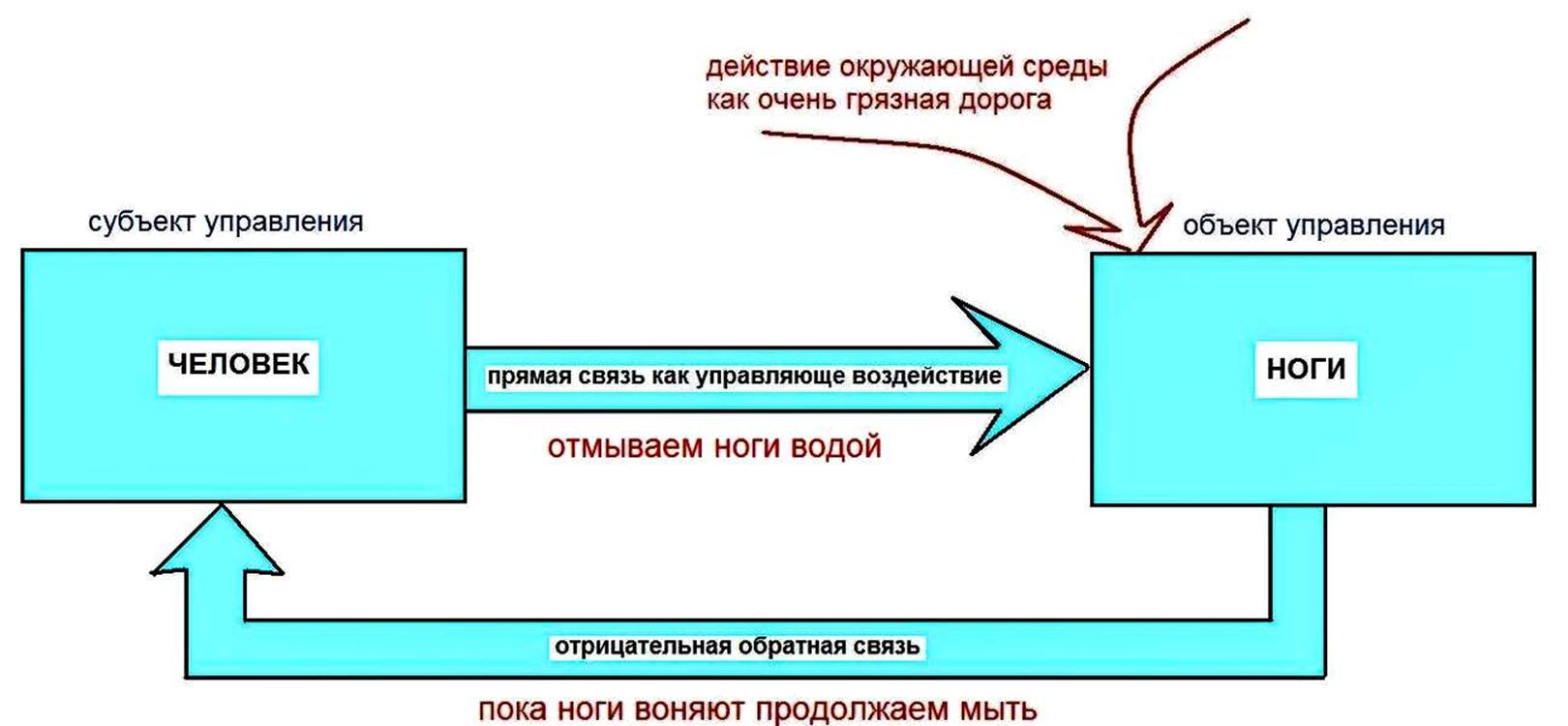
По сути надо обозначить:
- Субъект управления
- Объект управления
- Прямую связь как управляющее воздействие
- Отрицательную обратную связь как действие объекта управления на управляющее воздействие
- Действия окружающей среды, которые влияют на фактор, который давит и отчего надо, по сути, защищаться.
После чего заполнить ниже приведенную таблицу, где необходимо для каждого из 40 штук фактора среды, с которыми мы работаем, обозначить придуманные для них субъект управления, объект управления, придумать прямую связь с управляющим воздействием. А также придумать один вариант возможной отрицательной обратной связи и ещё придумать один варианта положительной обратной связи.
Таб. 7. 4. 6. -1
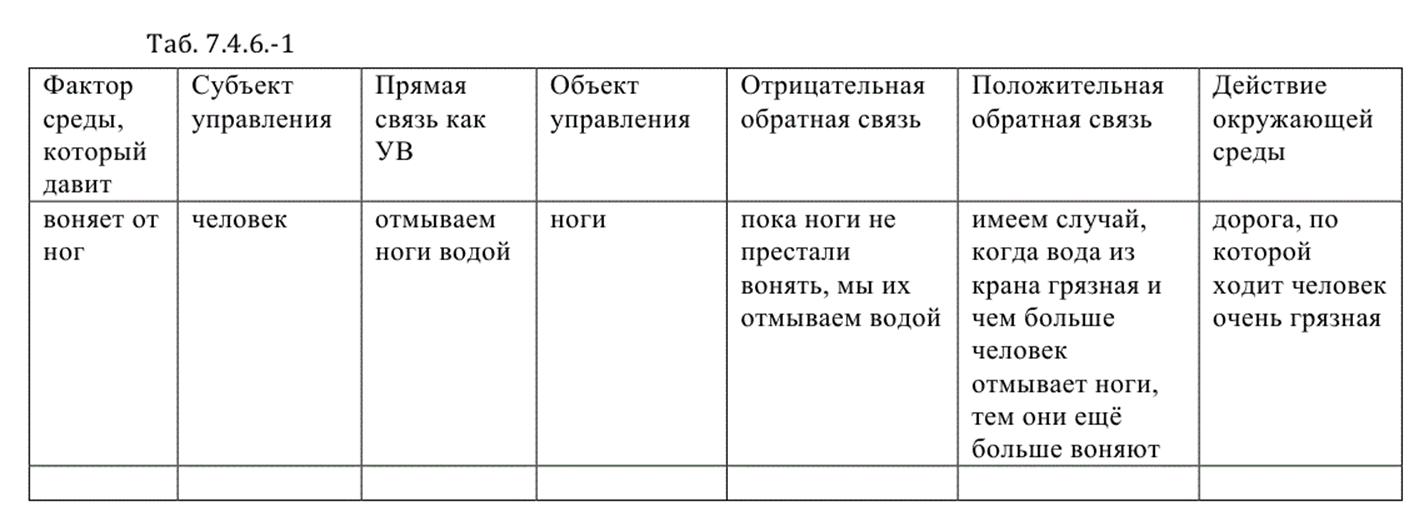
Возможно, возникнет вопрос, зачем практически, кроме одного пункта дублировать информацию в таблице из рисунка. Вся суть в том, что нам надо иметь в подсознании как графическое представления замкнутой системы, так и её представление в табличной форме. Так что не ленимся и всё делаем аккуратно и внимательно.
Теперь на данном этапе вам надо обобщить всю имеющуюся на данный момент информацию и выбрать все реальные объекты, которые связаны с фактором среды, который давит.
Смотрим ранее составленный наш вектор целей и вектор состояний в главе
/7. 4. 5. ПФУ 3 целеполагание/, где мы определялись с целями, подцелями, управляемыми параметрами и свободными параметрами и всё это совмещаем с данными из вышеописанных рисунков и заполненной таблицы.
По сути, нам надо из всего этого составить некий список всех объектов и ещё раз оценить наше отношение к ним.
То есть, нам надо выбрать все объекты, которые на данный момент входят в круг нашего внимания и которые связаны с фактором среды. После чего необходимо их распределись на соответствующие группы:
Управляемые объекты – объекты, на которые мы будем воздействовать управляемыми параметрами, дабы объект начал меняться так, как нам необходимо, это у нас будут управляемые объекты воздействия. И ещё есть управляемые объекты, на которые нам надо будет воздействовать, так как на них воздействует окружающая среда и от этого воздействия нам надо защищаться, это у нас будут управляемые объекты защиты.
Свободные объекты – объекты, на которые мы не будем воздействовать напрямую, но которые будут изменяться от нашего управления исходя из изменений управляемых объектов.
К примеру, фактор среды – просили родственники приехать в Хабаровск.
Цель – надо ночью прибыть в Хабаровск через 6 часов.
Управляемые объекты воздействия – машина, бензин
Управляемые объекты для защиты – ремень безопасности, ближний / дальний свет.
Свободные объекты – колёса, тормоза,
Всё, то же самое проводим со всеми подцелями, которые мы делали во 2 практике в главе /7. 4. 5. ПФУ 3 целеполагание/.
По большому счёту, мы банально расширяем нашу область управления и контроля, которую мы определяли в практиках /7. 4. 5. ПФУ 3 целеполагание/ на основе более конкретного подхода к управлению исходя из рассмотрения замкнутой системы управления.
Фактор среды – воняют ноги.
Таб. 7. 4. 6. -2
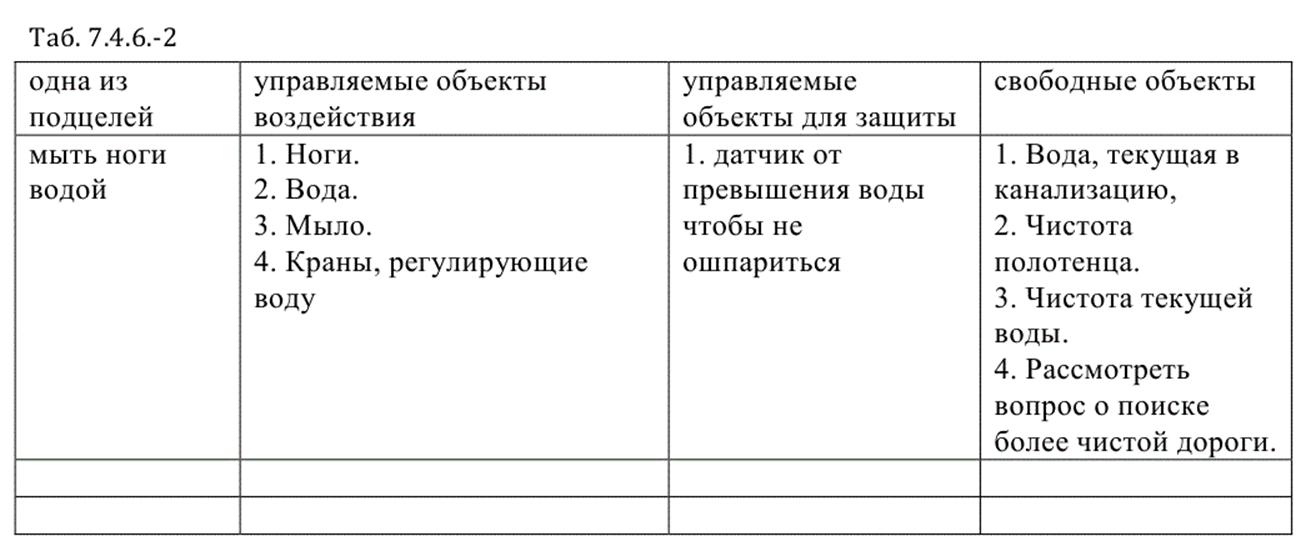
Прорабатываем все цели и подцели из наших 40 вариантов и заполняем таблицу для каждой подцели, подключаем воображение, особенно прорабатывая управляемые объекты защиты. Эта колонку надо особенно отрабатывать, так как вопросы безопасности это очень важные вопросы любого управления. Поэтому именно здесь необходимо нам натренироваться заранее, дабы этот аспект управления никогда не упускать. И в дальнейшем при формировании окончательного варианта концепции управления, вопрос безопасности необходимо отразить отдельным положением, дабы впоследствии из него отработать так называемую Технику Безопасности.
На следующем этапе мы анализируем устойчивость по предсказуемости каждого выбранного ранее объекта. То есть, мы должны образно представить, вообразить, можно сказать, проработать модель «поведения» нашего объекта, соотнеся всю имеющуюся информацию со своим опытом и интуицией и с чувством Меры.
То есть, на основе интуиции и чувства Меры, мы делаем предварительное предположение, после чего надо адекватно обосновывать своё предположение исходя из своего опыта, своих знаний, поиска дополнительной информации и научно подтверждённых данных.
По сути, для каждого нашего объекта, исходя из задачи управления, надо выбрать параметр, с которым мы будем работать, и через воображение и опыт и свои знания, предположить, устойчив ли этот объект по предсказуемости или нет – всё занести в таблицу. Для тех объектов, для которых мы уже подбирали параметры в 5 практике в главе /7. 4. 5. ПФУ 3 целеполагание/, можно их брать и сейчас, для тех объектов, которые не имеют параметров, следует их придумать.
Таб. 7. 4. 6. -3
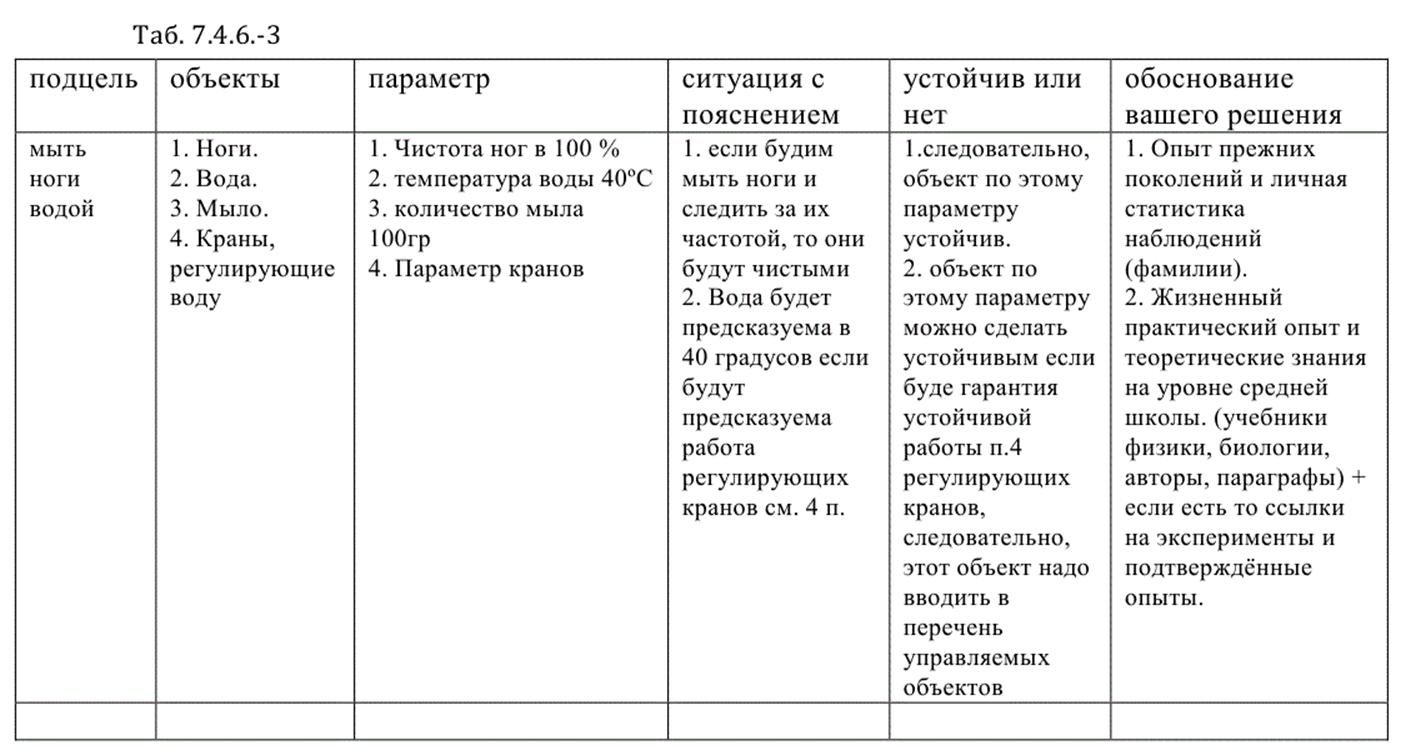
По сути, нам надо придумать некие ситуации из жизни, а для каждого нашего объекта предсказуемые параметры, и провести анализ объекта на устойчивость в смысле предсказуемости. То есть, надо выбрать, к примеру, управляемый параметр, а потом проверить его устойчивость и предсказуемость, и если он потенциально устойчив, к примеру, двигатель потребляет определенное количество бензина на 100 км, и в нашей ситуации нет никаких дополнительных условий. То тогда, мы действительно можем предпринять некие прогностические и управляемые действия – то есть, сделать прогноз, к примеру, о количестве необходимого бензина и взять его именно столько, сколько нам нужно для реализации цели.
Таблицу заполняем для каждой подцели и для всех 40 факторов среды.
Объём работы большой, но именно доведение до автоматизма разбор множественных ситуаций, даст вам новый стереотип мышления.
Далее вам необходимо придумать, вообразить ситуацию, при которой идёт срыв предсказуемости поведения объекта в определённой мере, под воздействием внешней среды, внутренних изменений и собственно управления.
То есть, нам необходимо провести тренировку возможного варианта по неустойчивости в смысле предсказуемости через имеющийся объект и через вариант развития ситуации с выходом этого объекта из надлежащего управления и переходе в неуправляемый вариант. Либо придумать новый объект, который в нашей ситуации, вообще не управляем по предсказуемости. К тому же, надо выявить главный параметр, воздействуя на который мы и определили неустойчивость нашего объекта, в смысле предсказуемости.
Таб. 7. 4. 6. -4
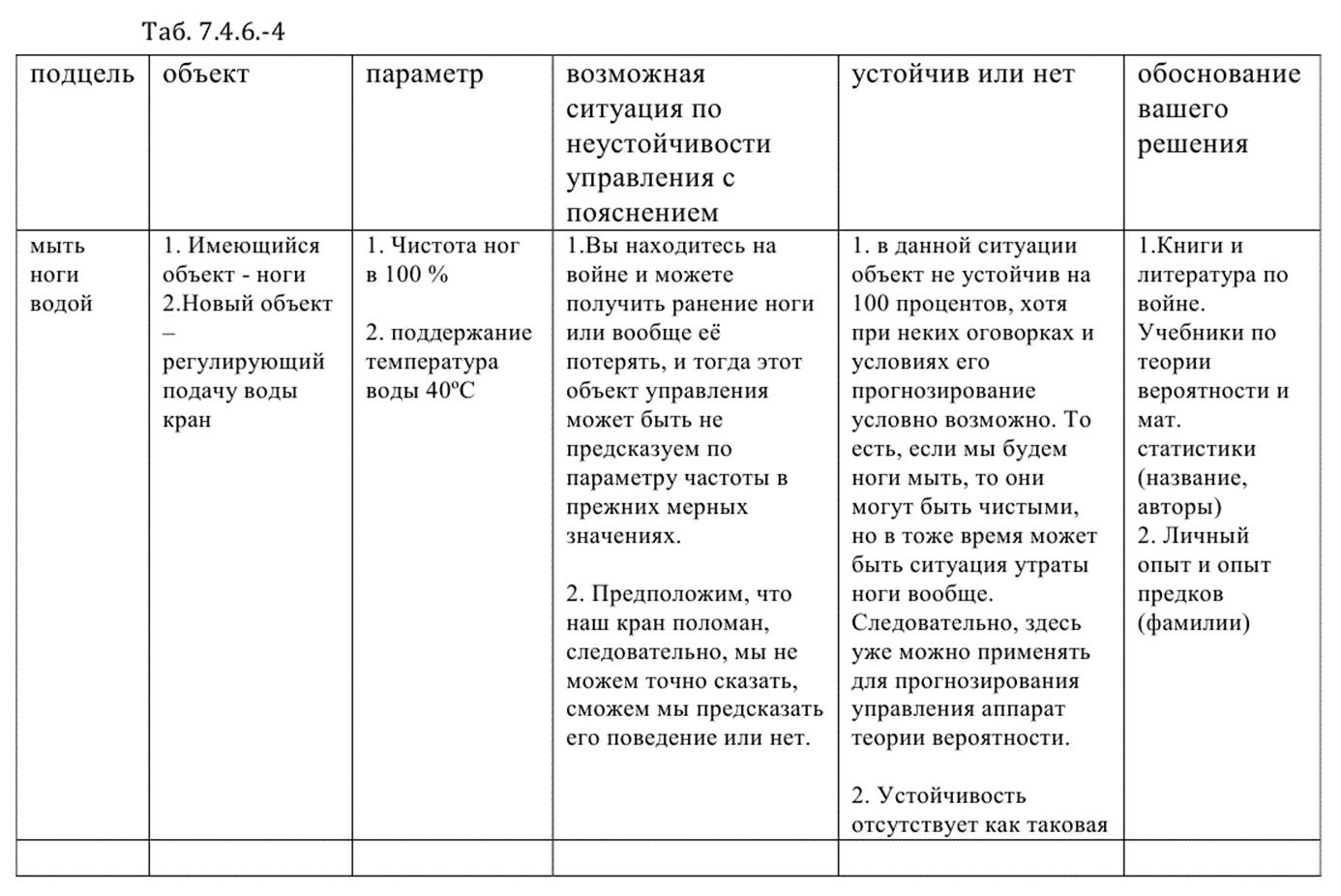
По большому счёту, надо проработать всевозможные варианты, насчёт того, как выбранные нами объекты будут себя вести, когда мы начнём реализовывать нашу цель и подцели.
Наша задача не лениться и записывать различные направления возможного поведения в соответствующих ячейках таблицы. Именно дотошное выполнение этого задания наработает навык поэтапного разбора целей и подцелей по вопросу устойчивости по предсказуемости. То есть, чем больше и подробнее вы заполните ячеек, тем потом быстрее и правильнее вы будете на подсознательном уровне решать похожие вопросы в своей повседневной жизни
2 практика
Выбор, исходя из Шести Приоратов Управления с выбором между управлением и самоуправлением
По большому счёту, здесь нет ничего сложного. Наша задача, исходя из имеющегося вектора целей, определиться с наилучшим и самым адекватным набором приоритетов управления для нашей цели и для каждой подцели, дабы равномерно были распределены и задействованы между собой варианты самоуправлении и управления исходя из всех шести возможных приоритетов управления.
Но в любом случае, если ресурсы системы позволяют, то необходимо всегда склоняться к самому первому высокому приоритету управления, в тоже время, не забывая о разумной мере. Но это мы будем делать при выборе, а пока нам надо банально проработать все варианты.
Так что, берём данные из таблицы 4 практики в главе /7. 4. 5. ПФУ 3 целеполагание/
И заполняем ниже указные таблицы для всех 40 наших ситуаций для каждой подцели, через работу своего воображения, придумывая, что мы будем делать с целью, над которой работаем, пробегая по каждому приоритету. Не ленимся и пишем текст нашего выдуманного варианта в соответствующую ячейку.
Именно множественное заполнение и продумывание каждой позиции, даст нам навык анализа и наилучшего применения шести приоритетов в любой ситуации по жизни.
Суть в том, чтобы как бы найти стимул для субъекта, дабы он осуществил необходимое действие. Здесь нам надо, как раз, и найти такой стимул исходя из Шести Приоритетов управления. Заполнять надо два варианта. Разница в вариантах только в том, что в первом варианте мы должны придумать стимул и способ заставить это сделать себя лично. То есть, придумать некий мотив исходя из выбранного приоритета, который нас, к примеру, заставит мыть ноги. А во втором варианте мы должны придумать такое управляющее воздействие, которое заставит это делать совершенно чужого человека.
Фактор среды – «воняют ноги», главная цель – «убрать вонь».
Таб. 7. 4. 6. -5
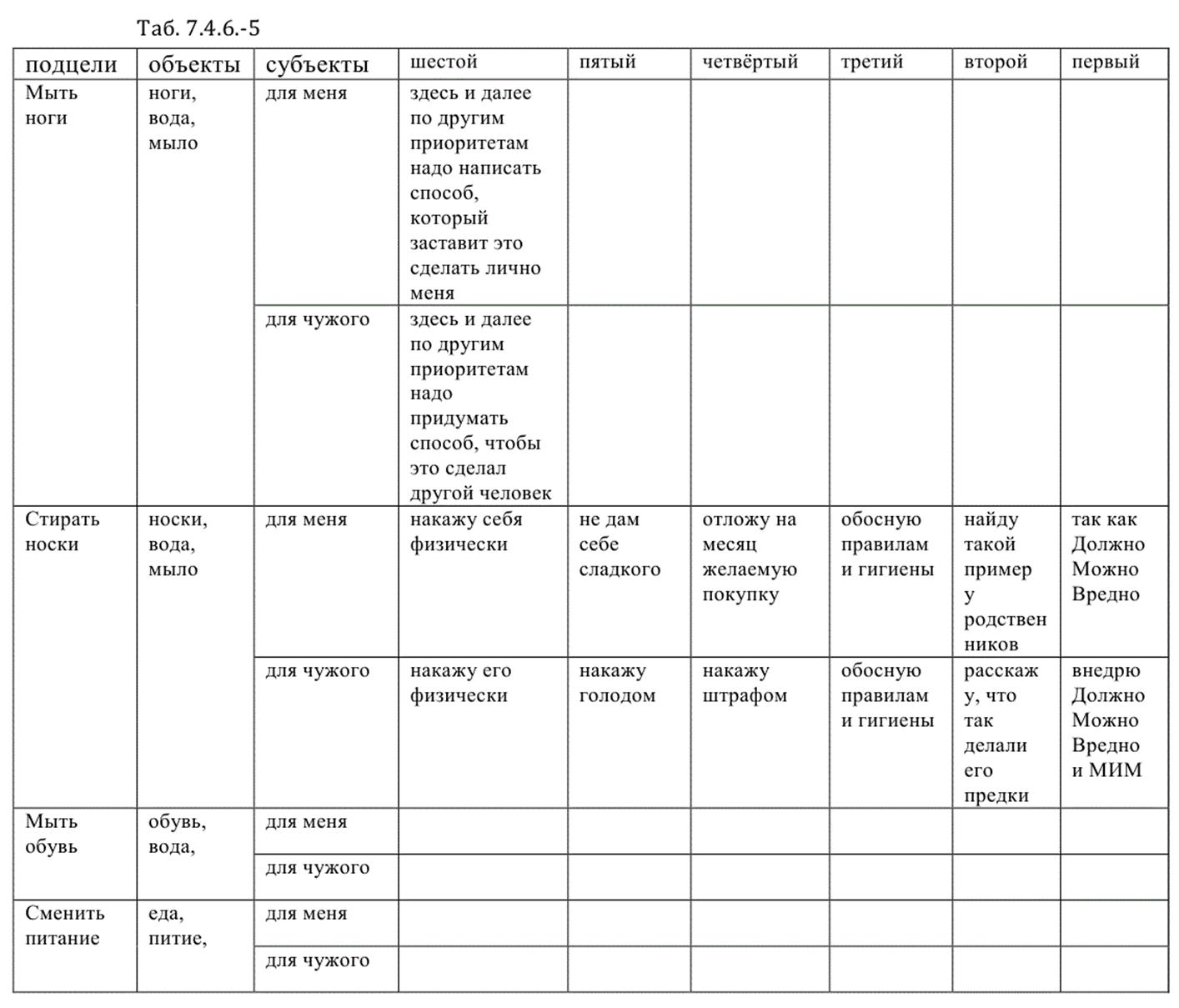
Теперь необходимо провести работу по выбору наилучшего на ваш взгляд варианта для каждой подцели и заполнить новую таблицу. То есть, выбираем один вариант из шести приоритетов управления, который, по вашему мнению, будет удовлетворять и скорости реализации, возможности реального применения и необходимому качеству и устойчивости. Должны быть описаны все 40 факторов среды.
Фактор среды – воняют ноги, главная цель – убрать вонь.
Таб. 7. 4. 6. -6
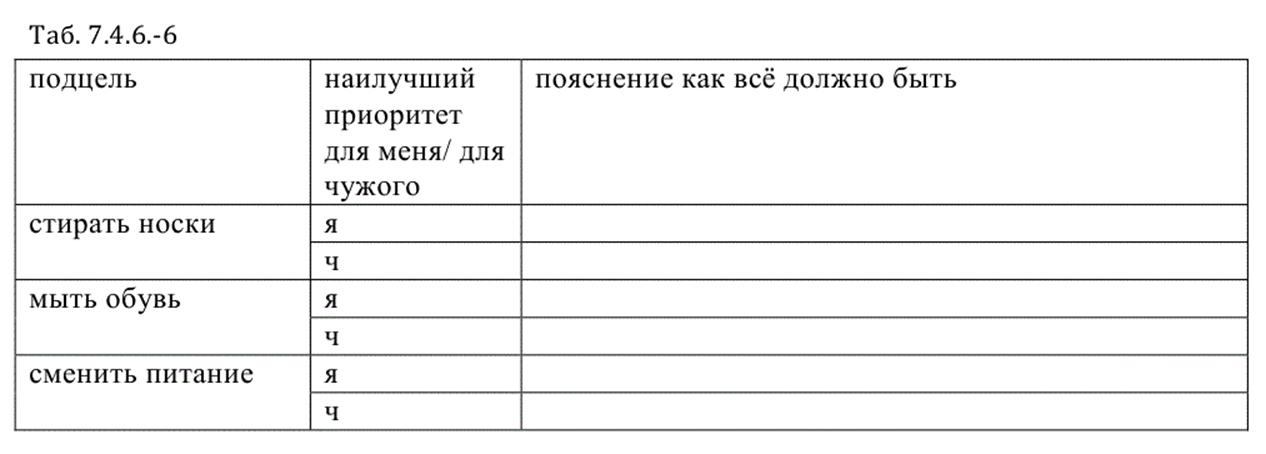
Для выбора наилучшего варианта надо исходить из имеющихся ресурсов и в обязательном порядке прогонять всё, по – Можно, Должно, Вредно:
- Можно всё по Совести (Справедливость и Мера).
- Должно стать «Человеком» (Развитие, Воля, Общинность).
- Нельзя (цикличность нарушать):
- причинять вреда себе и жить вне общины.
- причинять вреда окружающим людям и разрушать общность в ней.
- причинять вреда окружающей среде и разрушать общность с ней.
Как подсказку См. ролик в рекомендуемых видео:
/7178_6 приоритетов управления в ПФУ/
3 практика
Выбор из вариантов схемы управления – Программное, Программно-адаптивное, Предиктор-Корректор.
а) Практика по выбору схемы управления
Теперь стоит остановиться на другом аспекте. Мы уже предварительно в практике из главы /7. 4. 3. ПФУ 1 выявления фактора среды/ определяли форму действия нашего главного фактора среды, который давит и от которого всё, как говорится, и пошло исходя из:
- Непрерывное действие фактора.
- Циклически повторяемые действия фактора – с выявлением цикла.
- Статистически упорядоченные, эпизодические действия по некой программе – с выявлением программы через нахождение причин и соответствующих статистик.
Теперь наша задача заключается в том, чтобы проанализировать этот фактор на основе тех данных, которые мы выявили, исходя из выше указанных трёх пунктов. И тех данных, которые мы, так сказать, вообразили, заполняя первых три колонки таблицы в параграфе
№ 6 практика по Вектору текущего состояния
В главе /7. 4. 5. ПФУ 3 целеполагание/
Таб. 7. 4. 6. -7 (аналог Таб. 7. 4. 5. -8)
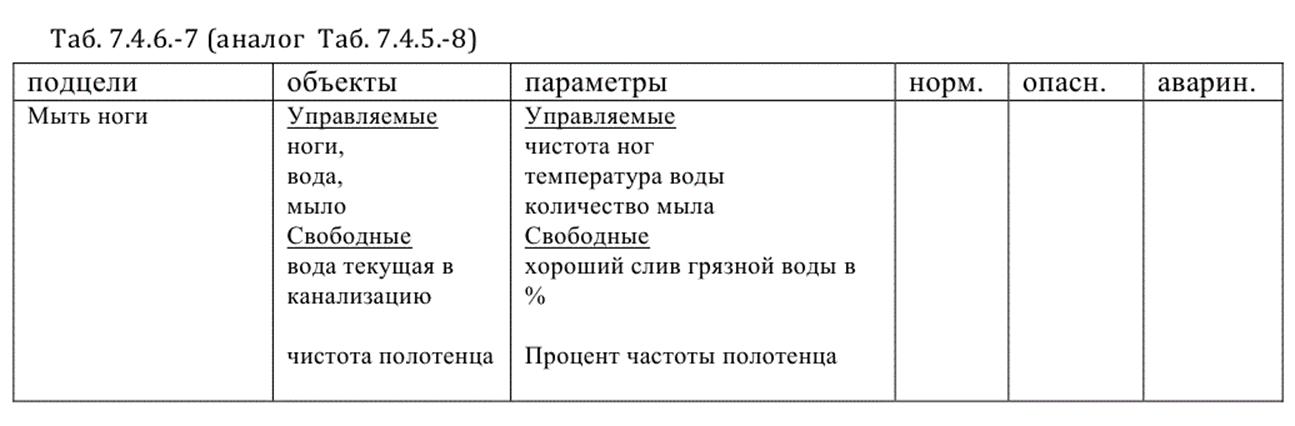
И после этого, исходя из понимания как работают все три схемы управления (Программное, Программно-адаптивное, Предиктор-Корректор), нам надо выбрать как для главной цели, так и для всех подцелей наилучший вариант схемы управления и заполнить нижнюю таблицу, в которой вместо колонок (норм. опасн. аварин. ) будут колонки с наилучшим подходящим вариантом схемы управления
(Программное, Программно-адаптивное, Предиктор-Корректор).
В обязательном порядке, для каждой подцели необходимо, чтобы нашлось три объекта с разными схемами управления. Для этого надо включить воображение и банально придумать. То есть, должно быть хотя бы, для одного объекта выбрана и реально подходила схема управления Предиктор-Корректор. Для другого схема Программного управления и хотя бы была одна схема Программно-адаптивного управления. В соответствующей колонке и строке даём очень краткое пояснение нашему выбору.
Для того чтобы не было наугад проставленных вариантов, а было именно осмысленное решение на основе твёрдого понимания сути вопроса, ещё раз читаем параграф
№ 3. Выбор из вариантов – Программное, Программно-адаптивное, Предиктор-Корректор
В главе/7. 3. 4. Формирование концепции/
И желательно всю рекомендуемую литературу по этому вопросу.
Таб. 7. 4. 6. -8
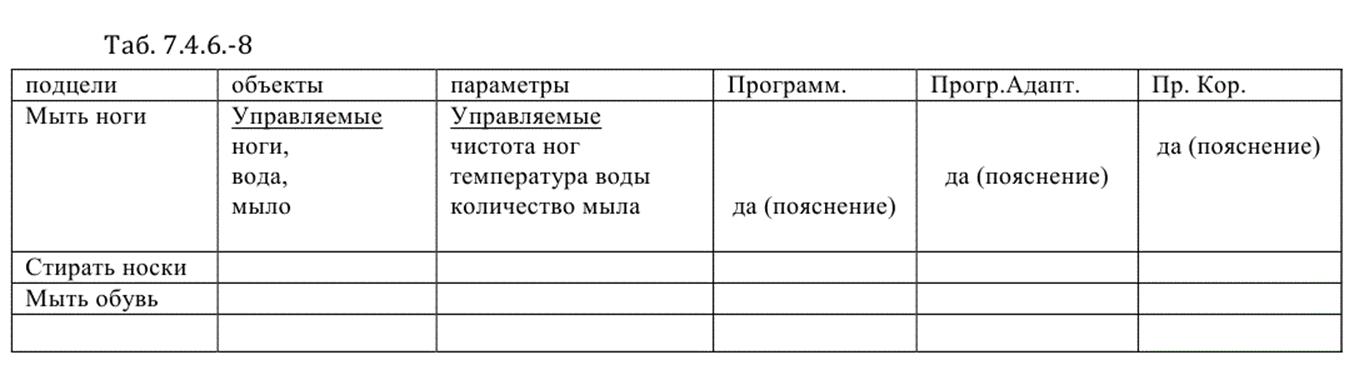
Здесь стоит отметить то факт что, для объектов, которые мы поместили в раздел «Свободных Параметров», мы определяем не способ управления, а способ отслеживания информации их изменения который также может быть разный.
В большинстве своём если наша главная цель не примитивно простая, и состоит из подцелей, то наилучший способ управления является способ Предиктор-Корректор, который покрывает все ошибки и недочёты других способов. Вся суть в том, что есть очень простые процессы, которыми можно управлять и простыми вариантами Программного способа и Программно-адаптивного, которые используют меньше ресурсов системы. И поэтому, когда мы будем тренироваться по выбору вариантов управления, прорабатывая наши объекты управления и объекты отслеживания информации, именно это и необходимо учитывать. К тому же, есть процессы, где усложнение управления настолько увеличивает сложность системы и время отработки, что иногда намного проще использовать самую простую схему управления, так как результат нужен с небольшой точностью и очень быстро. К примеру, если вы начнёте постоянно предполагать, строить ежесекундные прогнозы, с какой температурой может пойти вода, то вам некогда будет сосредоточиться на основной деятельности. А вот составить прогноз о степени загрязнении ног в будущем в некий день, когда вы очень много будете ими «пользоваться» и после этого предположительно увеличить программу по частоте мытья ног, вполне оправдано. С другой стороны, к примеру, программными средствами управлять количеством мыла довольно просто, достаточно наметить программу и проверять его достаточное количество один раз в неделю и всё.
Именно для наработки алгоритма по быстрому и адекватному определению необходимого способа управления в разных ситуациях и нужна эта тренировка. Так что, не ленимся, воображаем, представляем образно все процессы и объекты и отрабатываем все цели, все подцели и все объекты управления и контроля. Именно добросовестность в заполнение таблицы, и личное творчество, создаст в вашем подсознании необходимые стереотипы. Благодаря этим стереотипам, вы впоследствии практически на интуитивном уровне будете очень быстро подбирать наилучший и оптимальный способ управления в любых ситуациях. Необходимо отработать все наши 40 факторов среды и соответствующие цели и подцели.
Далее наша задача заключается в том, чтобы исходя из нашего выбора, который мы произвели ранее в верхней таблице. Нам необходимо для каждого из 40 факторов среды и для каждой подцели, выбрать именно три объекта управления с предполагаемыми схемами управления, которые бы покрывали все возможные варианты схем управления. То есть, надо выбрать для каждой подцели:
1 вариант программного управления с соответствующим объектом.
1 вариант программно адаптивного управления с соответствующим объектом.
1 вариант схемы предиктор корректор с соответствующим объектом.
В нашем случае для нашей подцели «мыть ноги» мы имеем:
1. Управление объектом «мыло» – схема программная.
2. Управление объектом «вода» – схема программно-адаптивная.
3. Управление объектом «ноги» – схема управления предиктор корректор.
После этого приступим к более подробному разбору каждой схемы исходя из выбранных объектов управления.
б) Программное управление
Ещё раз вспомним, что это такое.
Внешние обратные связи после включения схемы в процесс управления в замкнутой системе отсутствуют: текущая информация о состоянии внешней среды и положении объекта в ней в системе управления не используется.
Управляющий сигнал является функцией времени и, возможно, информации, поступающей по каналам внутренних обратных связей. Учёт влияния на поведение объекта всех возмущающих воздействий производится на стадии проектирования и создания объекта и (или) системы управления им и программы управления. Уровень максимально возможного качества управления является функцией соответствия программы управления реальным условиям её реализации, поскольку замкнутая система не реагирует на реальное воздействие внешней среды. Гибкость поведения отсутствует.
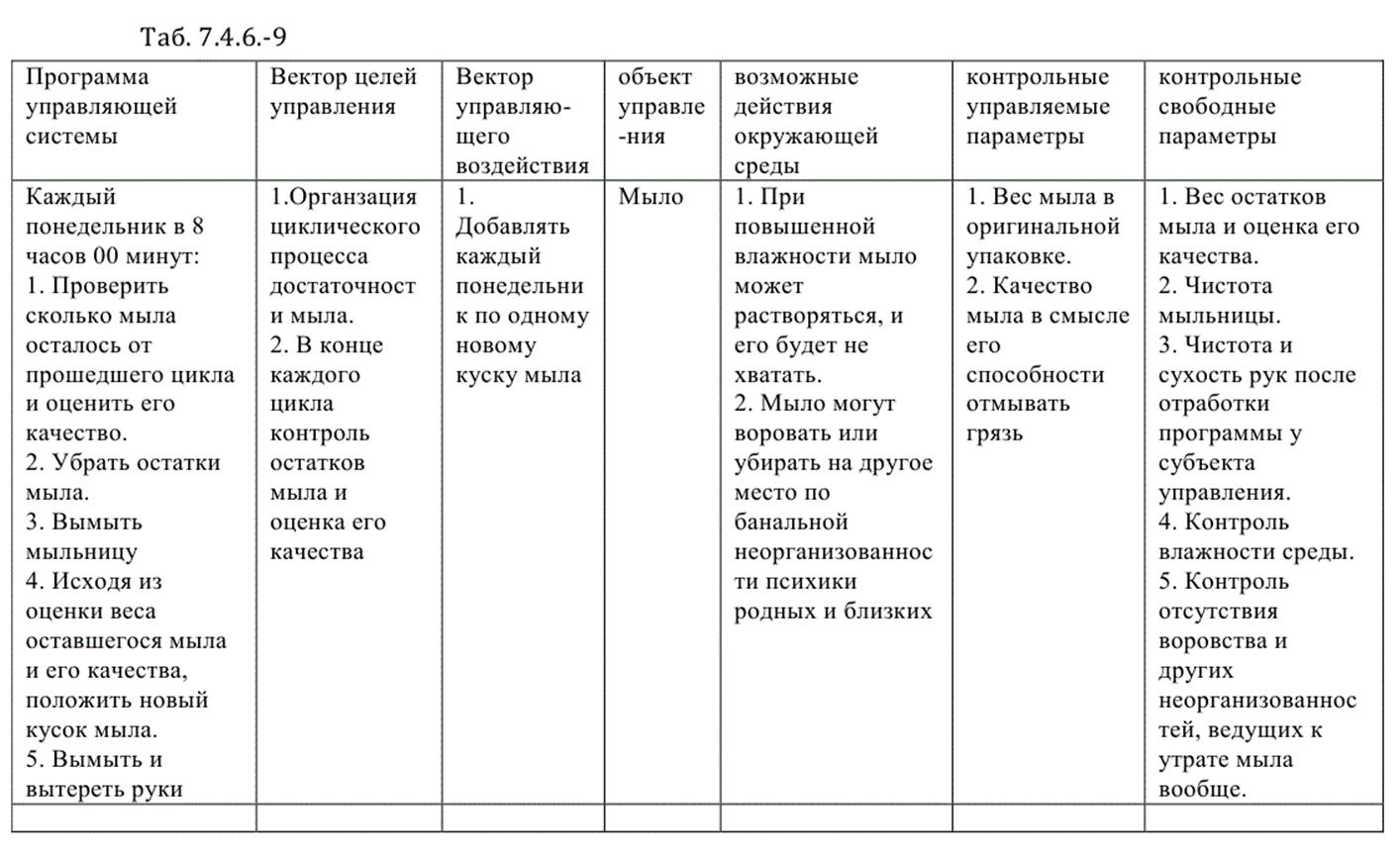
Теперь нам надо, так сказать, составить программное управление для объекта «мыло»
Исходя из выше сказанного, нам по сути надо банально составить программу управления и сделать так, чтобы она работала, и наши цели были достигнуты.
В нашем случае для этого объекта управления, наша цель, чтобы мыло всегда было в наличии. У нас нет надобности в данном случае, усложнять схему управления, нам достаточно предположить исходя из прошлого опыта, что если мы будем один раз в неделю подкладывать по куску мыла, то этого достаточно для реализации нашей подцели «мыть ноги».
Наша задача, включая воображение, придумать соответствующую ситуацию и заполнить ниже приведённую таблицу и провести подобный раздор для всех наших 40 примеров.
Таб. 7. 4. 6. -9
в) Программно-Адаптивное управление
Внешние обратные связи в системе есть. Управляющий сигнал является функцией реальных параметров внешней среды и замкнутой системы, информация о которых поступает по цепям внешних и внутренних обратных связей. Но в то же время, управляющий сигнал является и однозначной функцией программы (закона управления) в том смысле, что одинаковой информации, поступающей по цепям обратных связей, всегда соответствует один и тот же управляющий сигнал. Эту тождественность реакции «вход — выход» можно понимать и в смысле соответствия статистических характеристик управляющего сигнала информации, поступающей по цепям обратных связей. Реакция системы на возмущение до некоторой степени гибкая в том смысле, что управляющий сигнал и реакция замкнутой системы на возмущения — функция этих возмущений.
Программно адаптивная схема может реализовывать разные принципы управления. Отметим два наиболее часто встречающихся: управление по возмущению, и управление по отклонению. В первом случае система управления вырабатывает управляющий сигнал на основе измерения в процессе управления возмущающего непосредственно воздействия. Во втором случае, система управления вырабатывает управляющий сигнал на основе измерения контрольных параметров и оценки их отклонений от значений, характеризующих идеальный режим управления. При необходимости оба принципа могут сочетаться в одной и той же системе управления.
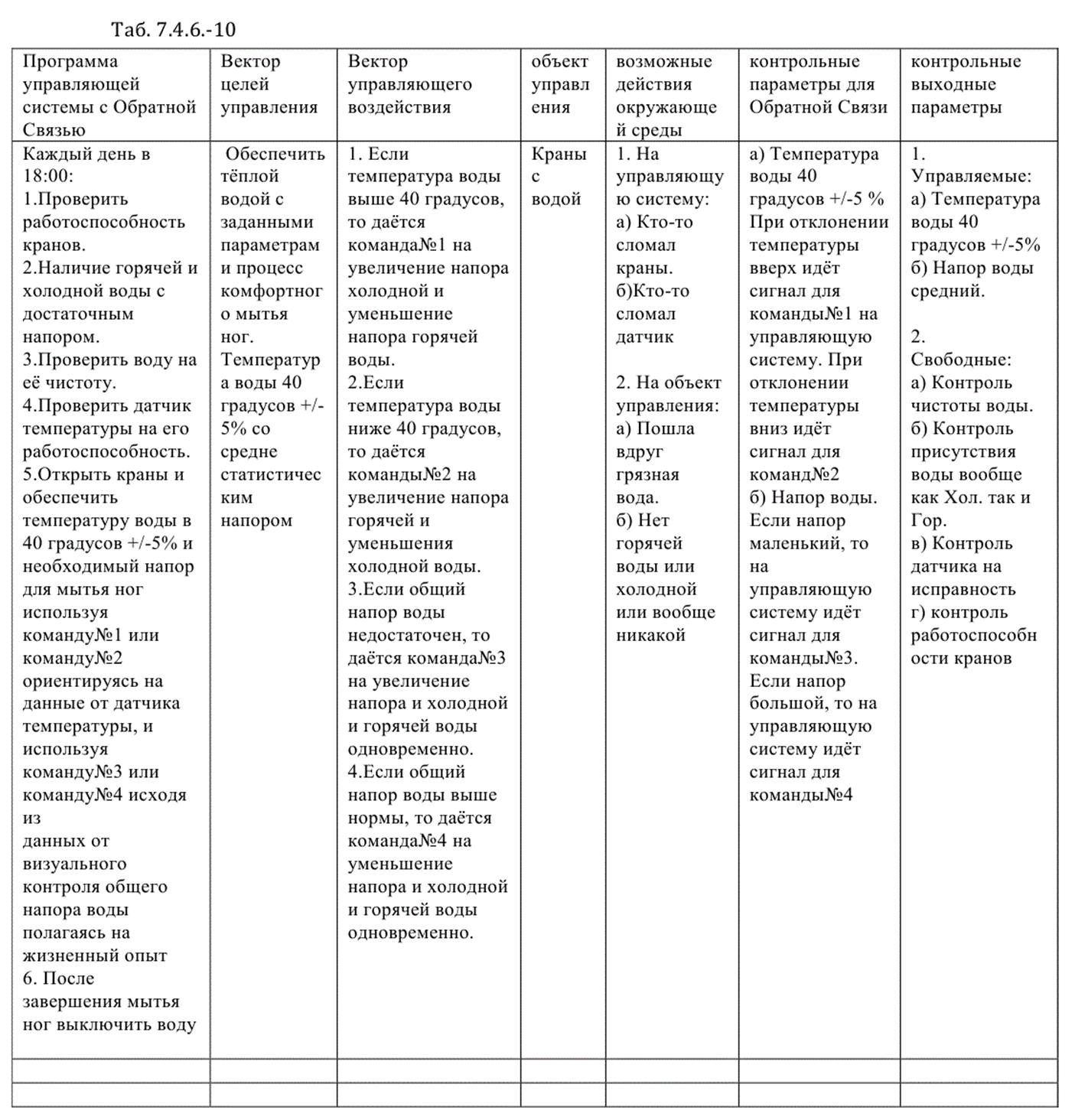
Теперь нам надо, так сказать, составить программно-адаптивное управление для нашего объекта «вода» из примера, который мы разбираем.
Исходя из выше сказанного, нам, по сути, необходимо банально составить программу управления с некой обратной связью и сделать так, чтобы она работала, и наши цели были достигнуты.
В нашем случае для этого объекта управления, наша цель заключается в том, чтобы организовать процесс таким образом, чтобы вода была чистой и с определенной температурой. В данном случае нам предстоит организовать регулирование температуры и контроль необходимых параметров через осуществление обратной связи.
Наша задача, включая воображение, придумать соответствующую ситуацию и заполнить ниже приведённую таблицу и провести подобный раздор для всех наших 40 примеров.
Таб. 7. 4. 6. -10
г) Управление по схеме Предиктор-Корректор
Это управление строится на основе прогнозирования в самом процессе управления поведения замкнутой системы, исходя из информации о текущем и прошлых состояниях замкнутой системы и воздействии на неё окружающей среды.
В этом принципиальное отличие схемы управления предиктор-корректор от программной и программно-адаптивной схем управления, в которых решение задачи прогностики полностью вынесено за пределы функционирования схемы в процессе управления.
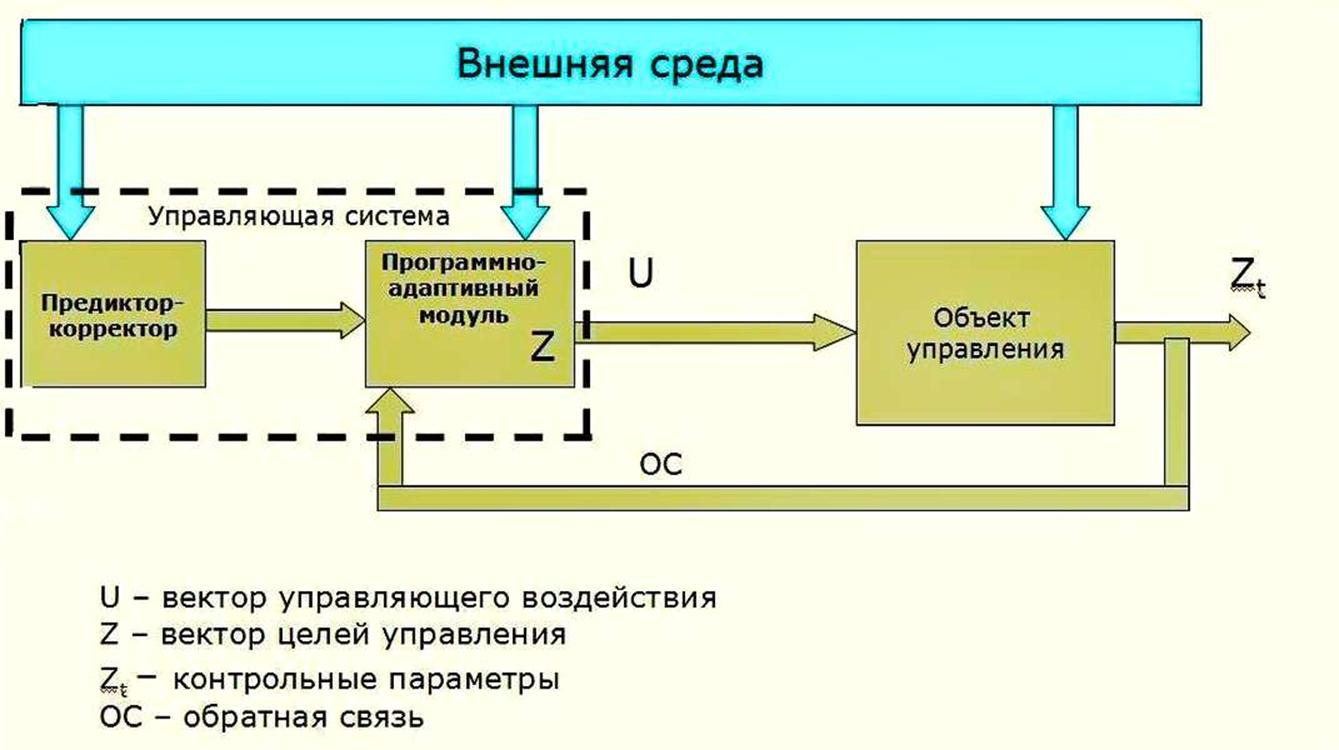
Структурно-алгоритмически система управления, реализующая схему предиктор-корректор, может быть условно представлена как сочетание:
предиктора, выполняющего функцию прогноза и выработки закона управления (программы управления) — этому соответствуют 1‑й — 4‑й этапы полной функции управления (ПФУ),
и программно-адаптивного модуля, который управляет объектом на основе закона управления, выработанного предиктором, адаптируя его к конкретике обстоятельств, в которых протекает процесс управления, — этому соответствуют 5‑й — 7‑й этапы полной функции управления (ПФУ).
При этом прогнозная информация в форме закона управления подаётся на вход программно-адаптивного модуля системы управления.
Вследствие этого система управления реагирует не только на уже свершившиеся отклонения замкнутой системы от идеального режима, но и на те, которые только имеют тенденцию к осуществлению (в случае, если прогнозирование достаточно точное). Если программно-адаптивное управление замыкает прямые и обратные связи через уже свершившееся прошлое, то в схеме предиктор-корректор некоторая часть прямых и обратных связей замыкается через прогнозируемое будущее. Информация о свершившемся прошлом и о настоящем в схеме предиктор-корректор, кроме прогнозирования и выработки управляющего сигнала, также используется как основа для минимизации (периодического обнуления) в процессе управления составляющей вектора ошибки, обусловленной накоплением с течением времени ошибок прогнозирования.
Очень важно именно в этом варианте, все новые и ключевые позиции, раскладывать на МИМ, давать свои определения и рисовать образные схемы. Иначе добиться адекватного предсказания и адекватного предвидения будет в принципе невозможно.
Следовательно, ошибки будут неизбежно, как у персонажа в анекдоте.
Пожелал негр стать белым, чтобы было много женщин и воды. В итоге у него всё исполнилось, и он стал унитазом в женском туалете.
Если вами выбран вариант схемы управления предиктор-корректор. То, следует в обязательном порядке, иметь методологию прогноза, иметь навык наработки прогноза и решения на этой основе узконаправленных и конкретных критериев по вопросу устойчивости в смысле предсказуемости.
Так что, если вы не очень внимательно или очень мало проработали примеров в выше указанной первой практике /1 практика Устойчивость по Предсказуемости/, то, по сути, для вас будет закрыт начальный этап освоения варианта управления в режиме Предиктор-Корректор.
Или, к примеру, если вы ничего не знаете о статистической предрасположенности и методов вычисления вероятности, то естественно говорить о какой либо предсказуемости вообще не может быть и речи.
К тому же, если вы не прошли, и не получили определенных навыков в предыдущих разделах по самообразованию, правки подсознания и тренировки интуиции. То вы не сможете адекватно выстраивать любые прогнозы. Так как, ваше мировоззрение будет не адекватно природе и окружающей среде, и поэтому на интуитивном уровне постоянно будут идти помехи и ошибки, а не необходимее интуитивные подсказки. А именно они, помогают сделать правильный выбор и правильно оценить важность или пустоту любого фактора и возможные его изменения.
- Начальная практика по предикту.
В самом начале необходимо взять календарь и выписать все праздники, с которыми вы имели дела на протяжении всего прошедшего года.
К примеру, день рождения знакомых и близких, профессиональные праздники и календарные праздники. Выписываете их все в столбик, а в другом столбце напротив выписанных дат и пояснений, ставите дату на месяц раньше и заносит эту дату в календарь напоминалку (к примеру Wандерлист) и намечаете, что вы будете покупать в виде подарка на этот день. Пусть даже будет любая мелочь, вплоть до яблока, но должна быть обязательно некая вещь, любо людям, либо себе, если этот праздник имеет отношение вам лично.
Потом ставите ежемесячные напоминания, к примеру, 1 числа каждого месяца о том, чтобы просмотреть весь список опять. То есть, первого числа вы, исходя из изменившейся обстановки и сложившейся окружающей среды, вносите коррективы в список, меняете или дополняет его.
Когда приходит напоминание о покупке подарка, то в обязательном порядке это исполняет как можно скорее. Лучше всего на этом этапе практиковать заказ в Интернете с учётом сроков доставки, так как сам процесс заказа и отслеживания тренирует у человека стереотип контроля и предсказания.
Ваша задача получить некий навык предсказания, когда, к примеру, вы вспоминаете о празднике и о необходимых действиях, до того как к вам придёт напоминание. Поэтому, спустя несколько месяцев такой практики, вам необходимо сделать так, чтобы вам на глаза не попадался список всех предстоящих праздников и время напоминания подготовки к ним. Вам должно хватать напоминания в начале месяца, чтобы за день до отмеченной даты вы «предсказали» намеченное событие.
- Практика, с элементами статистики исходя для выбранных вариантов схемы управления Предиктор-Корректор.
Как уже отмечалось ранее, вопрос удачного предикта как возможного предсказания для составления соответствующей схемы управления весьма своеобразный. В нём очень большую роль занимает именно уровень личностного развитие индивида. Его умение работать с интуицией и ВВИ. По сути, у него должна быть особая культура мышления, освоением чего мы и занимались все предыдущие разделы.
Но это всё, совершенно не означает, что в нашей управленческой деятельности мы должны опираться только на эти аспекты. В предыдущем разделе уже говорилось, что отсутствие знаний и навыков по Статистики, Теории Вероятности и Математического Анализа, не даёт возможности полноценно управлять. Следовательно, сейчас, нам хоть и в малой степени, но в обязательном порядке необходимо проработать небольшой вариант применения этих знаний. Хочется отметить, что это только малая доля, которую надо освоить, так что, если хотите быть успешным управленцем в любой области человеческой жизни, то вам необходимо эти вопросы понимать и уметь все имеющиеся инструменты использовать в полной мере. Так что, если вы поленились и пропустили раздел связанный со статистикой и вероятностью, то возвращаемся и разбираемся.
См. главы:
/7. 2. 3. Статистика и вероятность/
/7. 4. 2. Первая практика по 12 основным вопросам/
Теперь нам необходимо вернуться к таблице, которую мы заполняли в верхнем параграфе
3 практика с подразделом а) Практика по выбору схемы управления.
Там, для вариантов, для которых мы выбрали схему управления Предиктор-Корректор нам надо придумать вымышленный ряд начальных измерений.
К примеру, возьмём ситуацию, когда от вас воняет и для того, чтобы избавиться от этой проблемы, мы и составим для выбранной подцели и выбранного объекта некое расширение вектора состояния. То есть, надо взять, грубо говоря, неделю, и вымышлено представить сколько раз мы в день мыли ноги и какова у нас в этот день, была чистота ног. По сути, надо составить таблицу распределения случайной величины.
Наша задача заключается в том, чтобы создать механизм, с помощью которого, мы можем предсказать какое наименьшее число раз нам необходимо для мытья ног, дабы, к примеру, их чистота не опускалась ниже 70 процентов. Конечно, наилучший вариант это иметь 100 процентную чистоту ног, но в реальности этого добиться на всём протяжении дня и недели практически не реально. Так как, пришлось бы целыми днями только мыть ноги и ничего не делать. Следовательно, необходимо выбрать приемлемый разумный вариант. После чего, уже можно предположить, что на данном этапе этого хватит и можно проработать некий план и в дальнейшем уже отслеживать получаемый результат на последующих этапах ПФУ, то есть, затем можно будет либо его увеличивать, либо уменьшать. Так, к примеру, если в дальнейшем действие этого объекта не буде оказывать сильного влияния на изменение действия главного фактора среды, который давит, то естественно в этом случае, мы можем для экономии ресурсов всей системы снизить выбранный ранее показатель. Либо, если увидим, что именно от этого и происходят все проблемы, то естественно мы выберем вариант на увеличение количества мытья ног в день, дабы добиться желаемого успеха.
Но именно найденные значения на этом этапе и будут нашими отправными точками для начала управления. Поэтому, дабы не сорвать управление в самом зародыше и необходимо использовать статистические данные, которые были в прошлом и носили хоть и приближенный, но более и мене реальный уровень. А уже имея эти данные, через имеющиеся знания, мы сможем высчитать наилучший начальный вариант. При этом надо всегда помнить, что выбираемый вами вариант должен быть всегда более 51 % от номинальной вероятности. То есть, если было три замера, то мы имеем номинальную вероятность 1/3 или приблизительно 0,333. Следовательно, наш выбираемый вариант в любом случае должен быть более 0,333, иначе неизбежно с самого начала будет процесс развиваться в сторону деградации.
Здесь не стоит придираться к рассматриваемому примеру. Он даётся именно для понимания сути, хотя естественно, когда вы будете придумывать и составлять свой ряд начальных измерений, конечно надо отталкиваться от реальных данных по жизни и не придумывать запредельные варианты, к примеру, мытьё ног в 25 раз в день.
В нашем примере мы выбрали объект ноги и отслеживаемый управляемый параметр их частота в процентах.
Придумываем вымышленную неделю, придумываем, сколько раз мы каждый день мыли ноги, и какая при этом была их предположительная чистота.
Составляем таблицу.
Таб. 7. 4. 6. -11

И так ещё раз, наша задача все эти значения придумать, т. е. взять из «головы» для того варианта, который мы выбрали, чтобы управлять по схеме Предиктор-Корректор. Здесь главное не лениться, так как это очень важное занятие.
Значения должны быть, конечно, хоть немного приближаться к реальным значениям из жизни и не выходить за рамки разумного. По большому счёту, вам необходимо смоделировать некий ряд испытаний и получения данных, для того, чтобы именно через образное мышление и представление этих ситуаций, заложить особый алгоритм мыслительного предикта в подсознание.
Этот особый алгоритм о начальных действиях вы затем будете всегда запускать в похожих ситуациях, когда необходимо будет применять схему управления Предиктор-Корректор. И если вы проработаете добросовестно все 40 примеров, то, скорее всего он будет у вас всплывать уже на автомате, как само собой разумеющееся.
И так, вы придумали вымышленные значения, заполнили таблицу. Теперь необходимо рассчитать вероятность, как мы делали в главе /7. 2. 3. Статистика и вероятность /.
Таб. 7. 4. 6. -12

1.Если мы будем мыть ноги 4 раза, то вероятность того, что ноги будут чистыми на 100 % равна 0,327.
2.Если мы будем мыть ноги 1 раз, то средняя вероятность того, что ноги будут чистыми в среднем на 18 %, будет равна 0,059.
Всего у нас было 7 замеров (7 дней), следовательно, имеем номинальную вероятность в размере 1/7 и равную 0,142. Это вероятность по сути 50% или 0,5.
Как уже ранее говорилось, что в любой ситуации, необходимо выбирать вариант, в котором более 50%, т. е. в нашем случаен более 0,142 и до 0,327. Иначе система не будет вообще развиваться.
Если подходит к нашей ситуации позиции средних значений, то мы в принципе имеем вариант, когда в этот период входит, грубо говоря, мытьё ног от 2 до 4 раз. Где по логике вещей 2 раза это чуть более 50%, что по нас не должно устраивать, так как нам необходимо предпринять шаги к ликвидации запаха, следовательно, развивать нашу систему мы должны более высокими темпами. Поэтому, скорее всего вариант в мытье ног по 3 раза на дню нас должен устроить. Повторимся, что это именно пример для понимания сути.
Конечно, можно было взять и переменный ряд, как указано ниже или какой-либо другой.
Таб. 7. 4. 6. -14

По сути, вот именно в этом вопросе и на этом этапе уже можно и подключать, развитое наше чувство Меры, интуицию и связь с ВВИ. После чего принимать то решение, которое является на данный момент для нас наиболее приемлемым и даже можно сказать «приятным» и подталкивающим.
По большому счёту, всё выше рассмотренное, является начальным уровнем концепции достижения цели в виде разумной чистоты ног. По сути, мы предсказали некое значение и выбрали вариант достижения. Остаётся только его реализовать, после чего надо посмотреть результат и если он нас не устроит, то тогда следует провести дополнительную корректировку.
Если сделать небольшой вывод, то мы получили один из этапов отработки схемы Предиктор-Корректор.
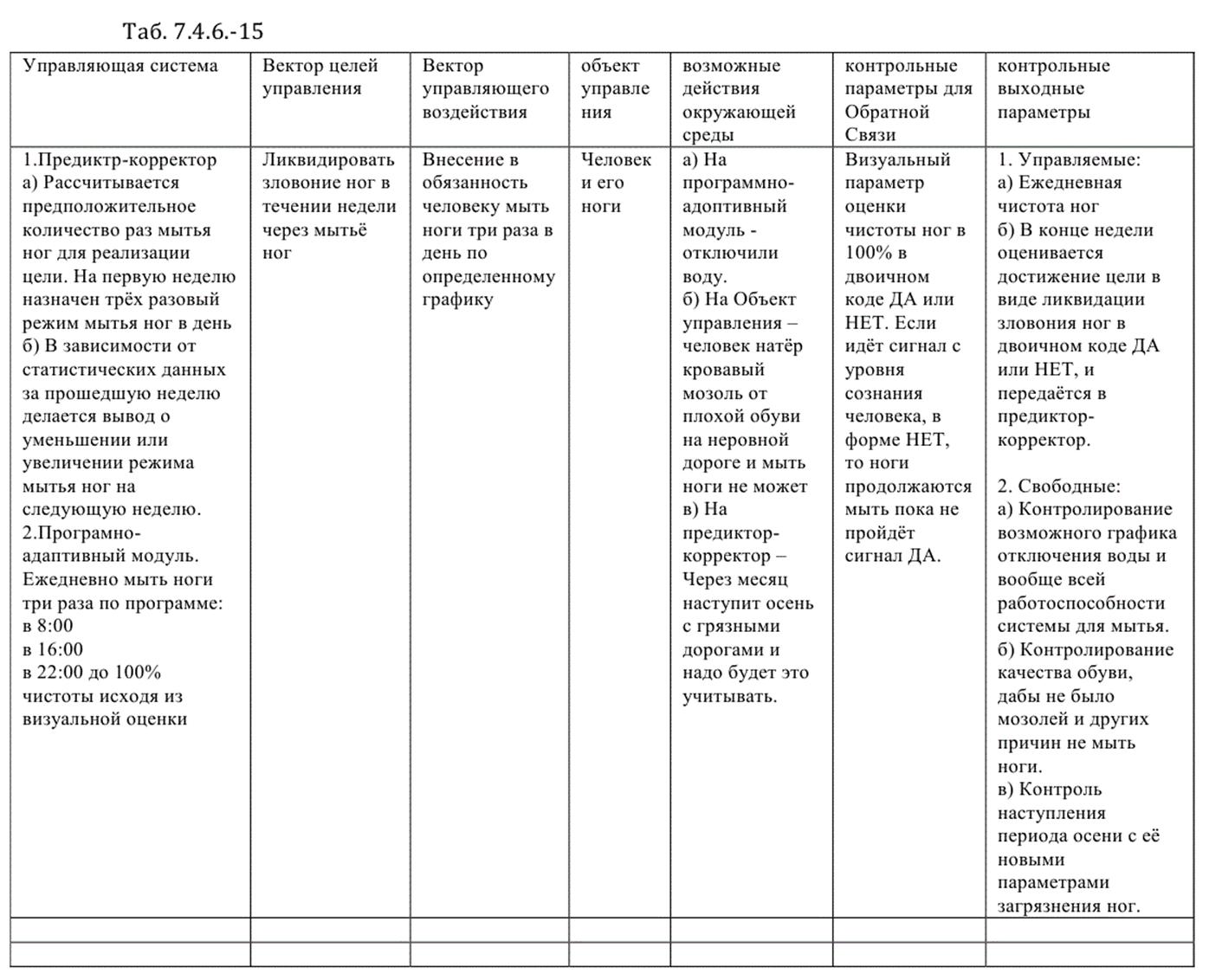
Теперь всё что мы делали ранее, мы должны полноценно применить для организации управления по схеме Предиктор-корректор относительно ранее выбранного для этого объекта «ноги». Исходя из выше описанных действий, по предсказанию грозности ног, мы выбрали наилучший предварительный режим их мытья – три раза в день. Теперь наша задача заключается в том, чтобы реализовать этот режим.
Для этого, исходя, из полученных знаний ранее, заполняем ниже указную таблицу и прорабатываем все 40 вариантов.
Таб. 7. 4. 6. -15
- Практика по вычислению дополнительных контрольных параметров.
В предыдущее практике, мы, по сути, составляли некий закон распределения случайных величин, получения оценочных характеристик чистоты ног.
Таб. 7. 4. 6. -16 (аналог Таб. 7. 4. 6. -12/

Теперь наша задача для этого ряда рассчитать числовые характеристики случайных величин как мы делали в главе /7. 2. 3. Статистика и вероятность /.
Зачем нам это надо.
Так вот, имея ниже рассчитанные характеристики, мы можем на более высоком уровне осуществлять не только прогноз нашего управления, но и более точное самоуправление, и его регулирование. По сути, используя новые высчитываемые контрольные параметры, и вводя их, впоследствии в схему управления и контроля, мы будем управлять по схеме предиктор-корректор практически на точной математической основе. Что конечно отразится на нашем управлении только в наилучшую сторону.
Так что, берём законы распределения, которые мы составляли для всех наших 40 примеров и учимся просчитывать дополнительные контрольные параметры.
1. Математическое ожидание
По сути математическое ожидание М(х) это среднее значение. Оно характеризует среднее значение случайной величины (ожидаемое значание)

2. Мода
Мода (M*) – характеризует значение случайной величины, реализующееся с наибольшей вероятностью.
3. Дисперсия
Дисперсия показывает степень разброса случайной величины (разброс данных) относительно Математического ожидания М(х).
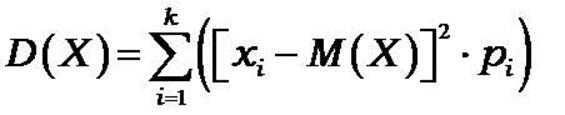
Суть в том, чтобы исходя из своего управления, добиваться уменьшения дисперсии относительно желаемых параметров, что ведёт к наилучшим показателям.
4. Среднее отклонение
Среднее отклонение показывает на какую величину в среднем отличатся значения случайной величины от её математического ожидания М(х)

Суть в том, чтобы исходя из своего управления, добиваться уменьшения среднего отклонения, что ведёт к более точным показателям.
5. Коэффициент вариации.
Коэффициент вариации случайной величины характеризует стандартное отклонение в долях от математического ожидания.
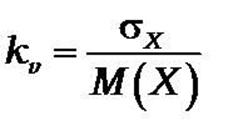
Суть в том, что низкие показатели вариации говорят, к примеру, о стабильной ситуации на производстве или в других процессах, где была произведена выборка контролируемых параметров.
По большому счёту нам надо провозвести такие же расчёты, которые мы делали в примере, когда проводили расчеты из таблицы с оценками студентов на экзамене. Именно отрывок этих расчетов и показан ниже.
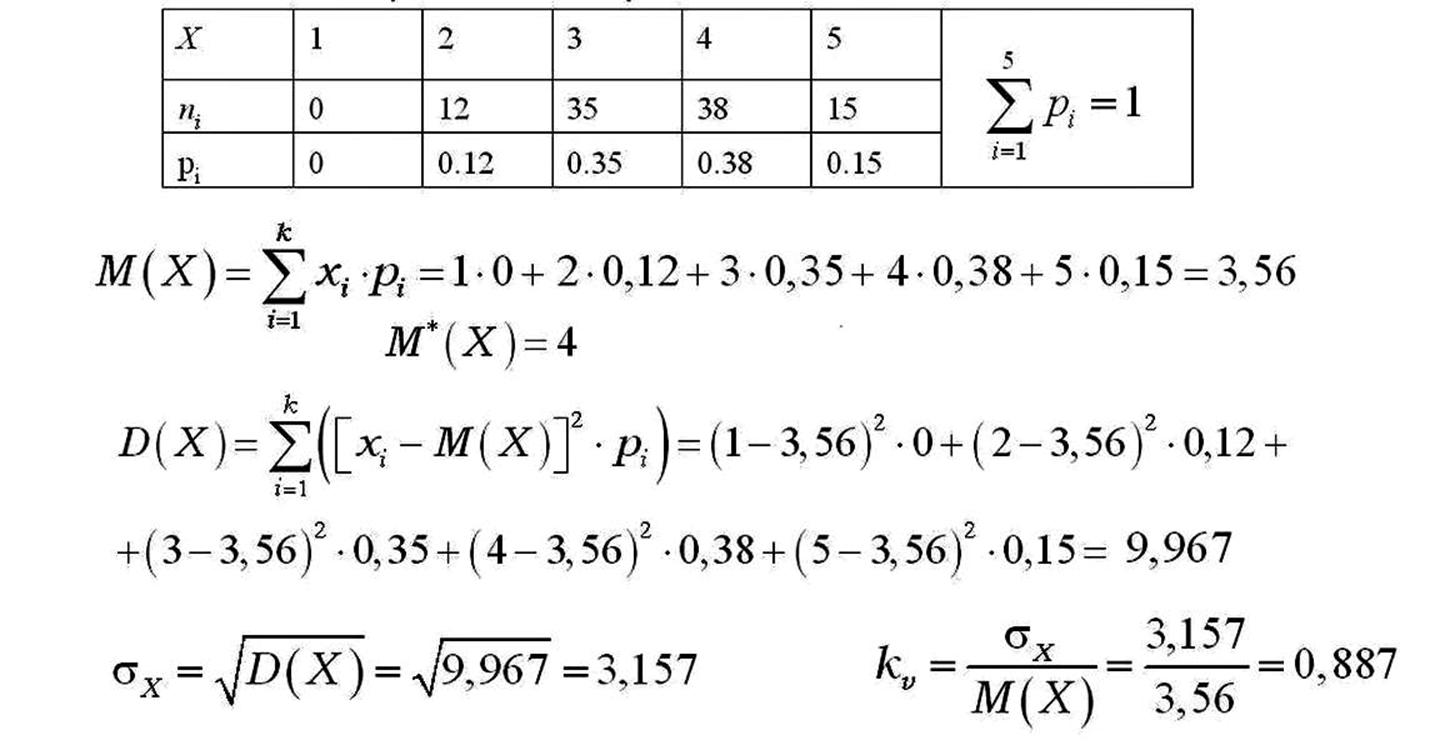
По сути, делаем аналогичные расчеты, только исходя из данных, которые мы «сформировали» в предыдущее практике.
В итоге мы должны проработать не менее 40 таблиц для разных ситуаций и получить соответствующие дополнительные контрольные параметры, которые мы в дальнейшем будем использовать для отслеживания качества нашего управления.
4 практика
Выбор из вариантов – Структурный, Бесструктурный, Виртуальный.
На этом этапе, мы должны уметь с первого взгляда определяться с выбором способа управления, хотя бы в самых общих чертах.
То есть, на стадии формирования концепции управления мы должны уже иметь некое предварительное заключение на счёт способа управления.
Надо исходить из того, что структурный способ более быстрый и предсказуем
Бесструктурный способ менее затратный и имеет более устойчивое по времени управляющее воздействие, но зато имеет фактор, при неумелом обращении, некой непредсказуемости, требует большего затрата времени и к тому же он менее «расторопный». Виртуальный способ более благоприятен на длительных и секретных режимах управления, к примеру, когда необходимо скрыть до поры до времени намерения или когда создание структурного управления невозможно исходя из обязательного противодействия с противной стороны.
Чтобы научисья быстро определяться по этому вопросу, необходимо не лениться и пробежаться по всем нашим 40 ситуациям факторов среды, дабы получилось в общем счёте 40 структурных, 40 бесструктурных и 40 виртуальных способов управления.
Для этого нам поможет заполнение нижеуказанной таблицы. В первый столбец пишем фактор среды, который давит, во второй, третий и четвёртый столбец пишем выдуманные варианты, с в меру расписанными текстовыми пояснениями решения проблемы, используя:
- Структурный способ управления
- Бесструктурный способ управление
- Управление на основе виртуальных структур
Таб. 7. 4. 6. -17
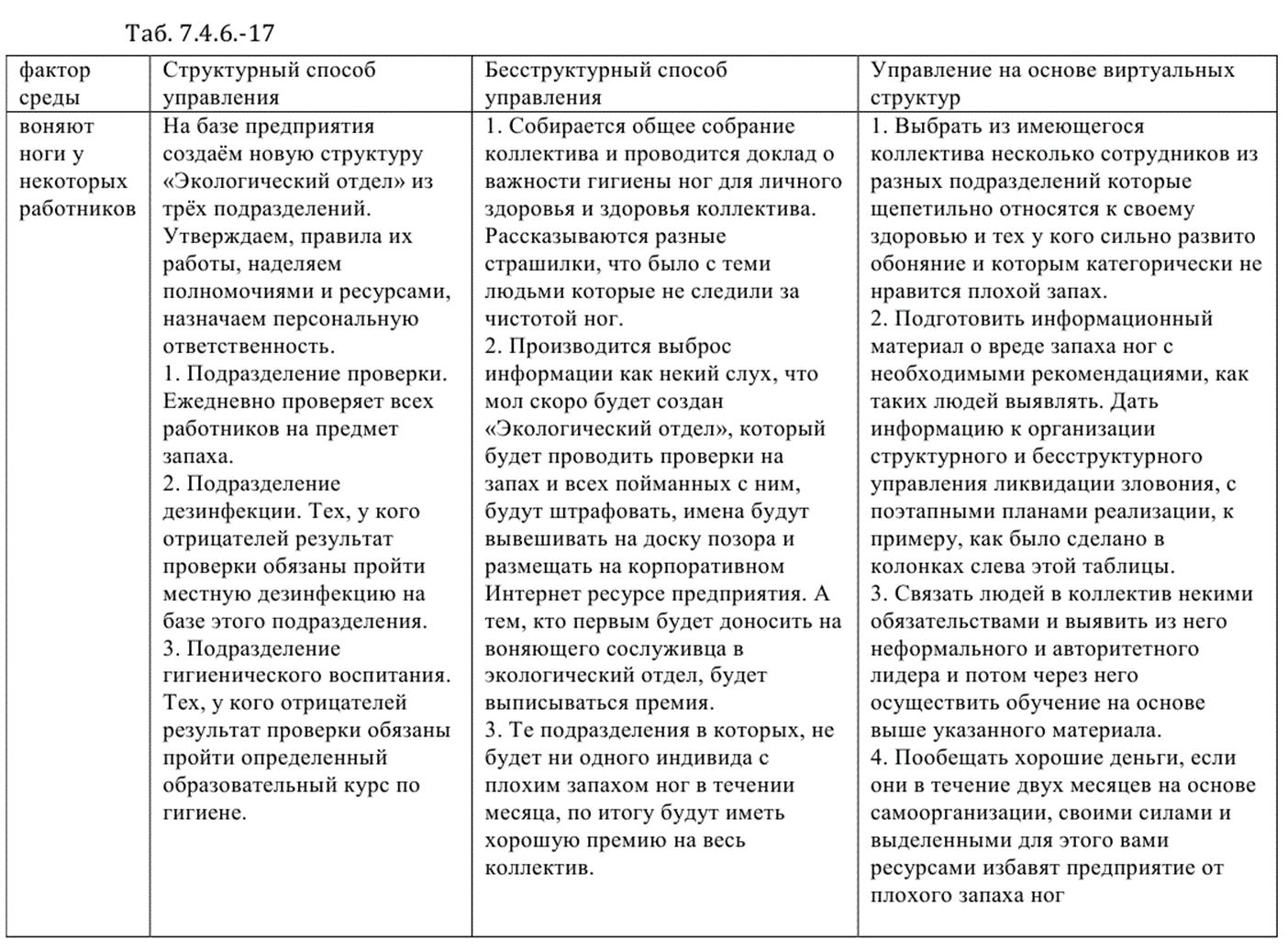
В приведённых примерах выше в большинстве своём использовался 4 приоритет обобщенных средств управления (деньги) чтобы заставить людей выполнять то, что вам необходимо. Вы уже поняли, что исходя из проблемы и необходимых параметров исполнения, можно использовать любые другие приоритеты обобщенных средств управления. Так что проявляем воображение, не ленимся и придумываем разные варианты. Тем более, мы уже во 2 практике этим занимались и у вас уже должен быть некий навык.
5 практика
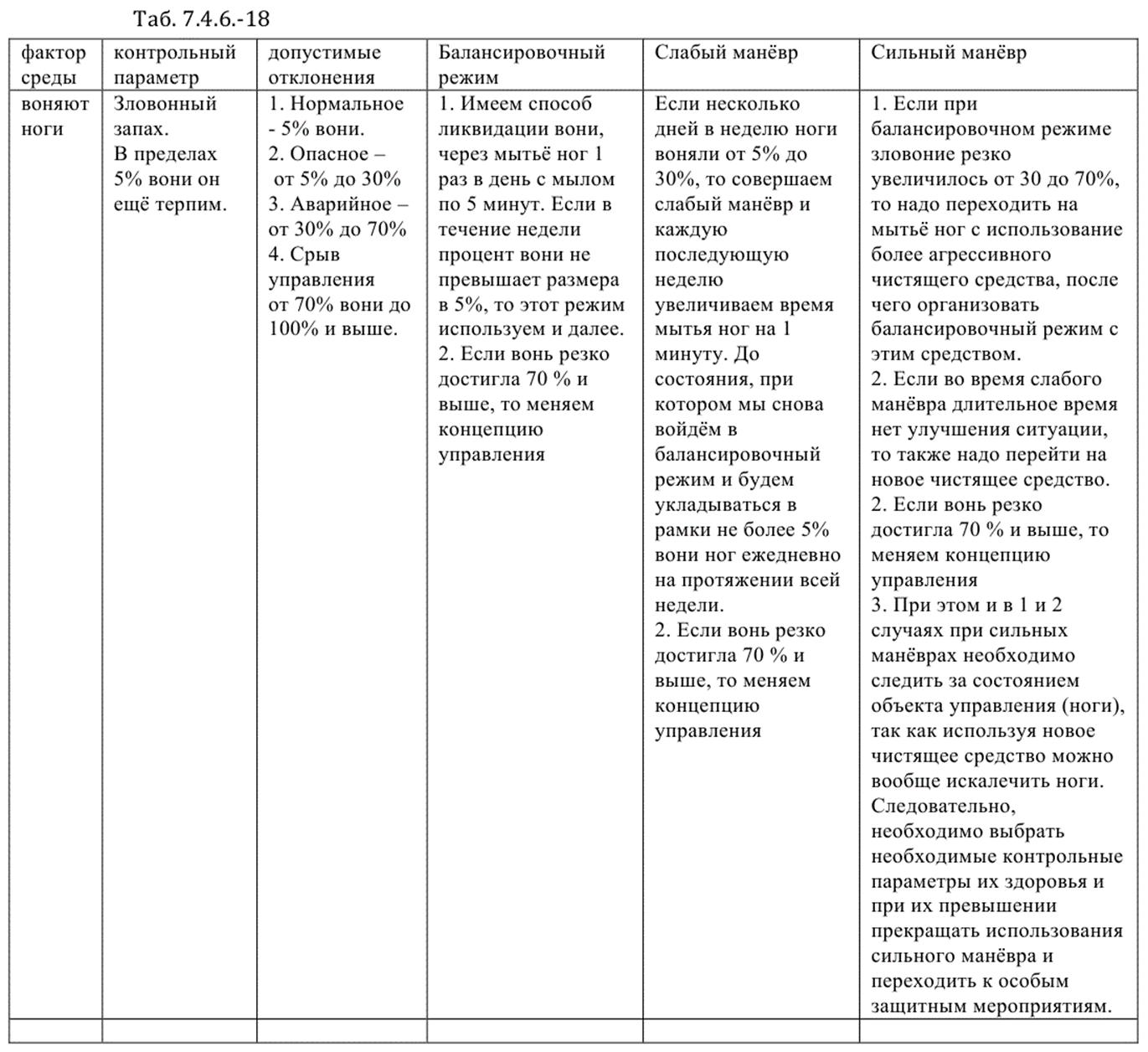
Предварительный выбор по режимам управления – Балансировочный режим, Слабый манёвр, Сильный манёвр.
Здесь необходимо научиться делать лишь основополагающий выбор для возможных режимов управления, подробнее этим вопросом мы займёмся в практическом разделе реализация концепции управления в главе /7. 4. 8. ПФУ 6 реализация и контроль/
Сейчас наша задача заключается в том, чтобы, как бы вообразить и придумать, возникновение некой ситуации и неких условий для фактора среды который давит, дабы его разрешение произвести используя:
- Балансировочный режим решения проблемы.
- Слабый манёвр, когда балансировочный режим либо не подходит, либо может, не справится с решением проблемы.
- Сильный манёвр, когда нет возможности задействовать слабый манёвр или его отработка не устраивает. При этом надо не забывать о возможности саморазрушения.
В 5 практике главы /7. 4. 5. ПФУ 3 целеполагание/, мы уже учились определять начальные значения контрольных параметров и допустимые отклонения. Так что, имея этот навык, мы должны заполнить нижнюю таблицу. То есть, нам надо придумать для каждого из всех наших 40 факторов среды по одному некому контрольному параметру и его возможные значения допустимых отклонений:
1. Нормальное отклонение.
2. Опасное отклонение.
3. Аварийное отклонение.
4 Отклонение, приведшее к срыву управления (катастрофа).
После чего, надо будет вообразить реально возможные ситуации для всех трёх режимов управления. При этом необходимо особенно заострить внимание на осуществлении управления при сильном манёвре, так как именно при нём возможны варианты, когда объект управления может превысить показатели физического запаса устойчивости.
То есть, надо придумать ситуацию, при которой этот режим может привести, по неким параметрам, к саморазрушению объекта управления. Именно это замечание очень важно и его надо всегда отслеживать при организации сильного манёвра.
Всё что вообразим, аккуратно заносим в таблицу.
Таб. 7. 4. 6. -18
См. дополнительные пояснения.
Литература:
Видео:
/7180_Балансировочные режимы и манёвры с примерами/
6 практика
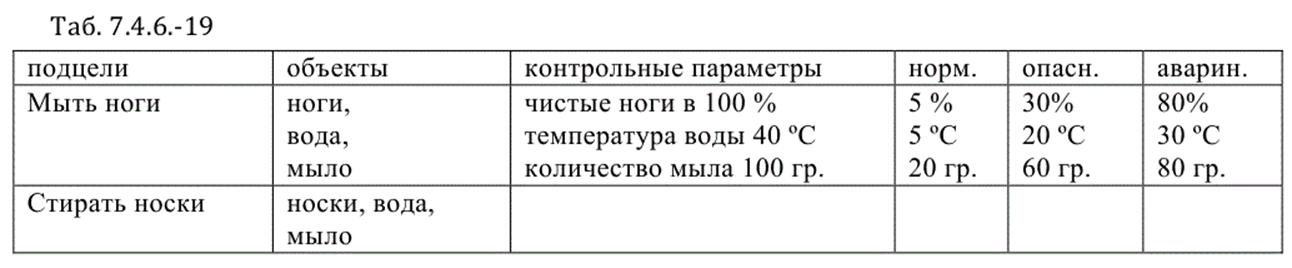
Выбор области потенциально устойчивого, допустимого и качественного (нормального) управления.
Этот пункт рассматривается на основе выше проработанных параметров от первого пункта, где мы определяли Устойчивости в Смысле Предсказуемости.
Так же См. параграф № 6 в главе /7. 3. 4. Формирование концепции/.
Ранее мы уже работали с критериями качества управления
См. параграф 5 практика в главе /7. 4. 5. ПФУ 3 целеполагание/.
Там мы для нашего вектора целей управления и для наших выбранных объектов выбирали:
- Контрольные параметры.
- Допустимы отклонения.
Где контрольные параметры это параметры, за которыми необходимо следить, к примеру, скорость машины, запас бензина и так далее.
А допустимые отклонения это предельные мерные значения контрольных параметров, за которые нельзя выходить, иначе срыв управления неизбежен, их лучше разграничить тремя вариантами.
- Возможные отклонения при нормальном качественном управлении.
- Возможные отклонения в условиях потенциально опасных обстоятельств.
- Возможные отклонения при аварийном управлении.
Таб. 7. 4. 6. -19
Теперь попробуем совместить выше упомянутое, с информацией по области потенциально устойчивого, допустимого и качественного управления.
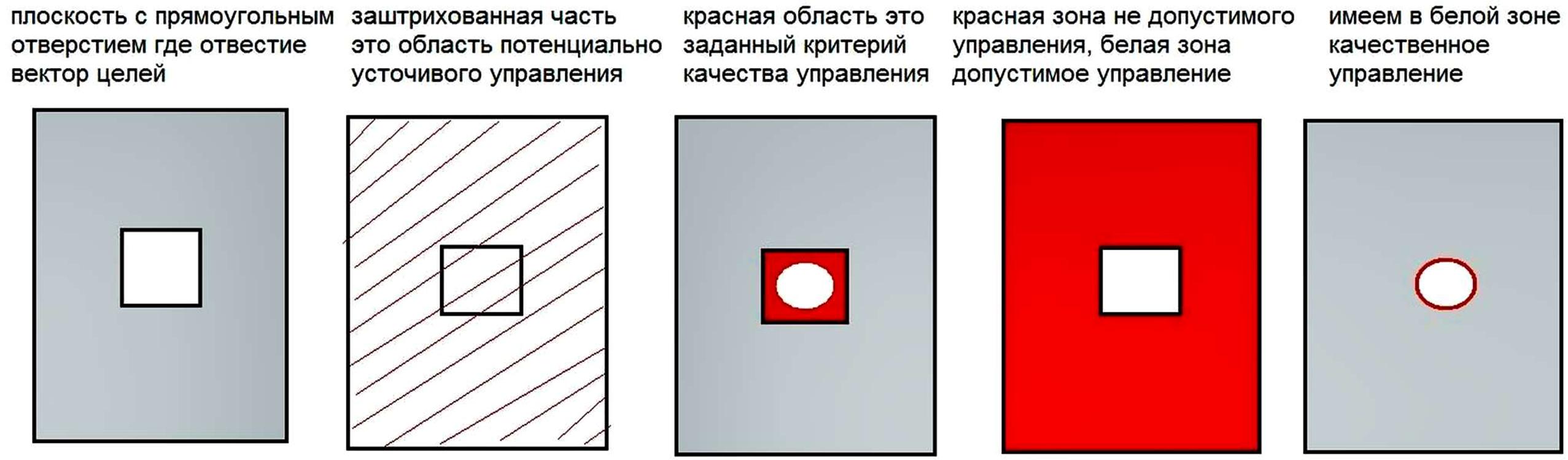
Для понимания сути, приведём простой пример, допустим, нам необходимо выехать из некой деревни и добраться до города Хабаровск не позднее 18 часов вечера.
Так вот, в нашем случае с поездкой в Хабаровск мы имеем область Потенциально Устойчивого Управления (ПУУ) в виде радиуса от начала движения в любую сторону пока хватит бензина и других ресурсов машины и других возможностей. Выход за эту область приведёт к режиму аварийного управления и для этого мы определяли возможные аварийные параметры.
Далее мы имеем зону Допустимого Управления (ДУ), по сути это все дороги которые ведут в Хабаровск, следовательно, зона недопустимого управления это все дороги которые не веду в Хабаровск. Так вот, выход за область Допустимого Управления приведёт нас к отклонениям в условиях потенциально опасных обстоятельств и для этого мы определяли возможные опасные параметры.
Если мы, к примеру, за хорошее качество достижения цели выбрали критерий возможного опоздания в 15 минут, то тем самым мы выбрали критерий качества управления. В результате чего мы получили зону Качественного Управления (КУ) в виде проезда по некой дороге до города Хабаровск на машине с достижением цели не позднее 18 часов 15 минут. Выход за это условие приведёт нас к ненормальному, некачественному управлению. Здесь критерий качества управления заданный в 15 минут, есть ничто иное как возможное допустимое нормальное отклонение.
Далее следует определиться с «запасом устойчивости системы». Это, по сути, собственная характеристика системы, построенная на основе какой-либо (их может быть несколько) меры возмущающего воздействия, превышение которой ведёт к выходу вектора ошибки управления за допустимые пределы или к гибели системы.
По сути, запас устойчивости системы предстаёт как общая численность её элементов не используемая в данный момент для достижения цели.
Если говорить грубо, то это ресурс, к примеру, машины, который существует в запасе и который не предполагается расходовать для достижения цели.
Или можно ещё сказать, что всё, что не используется и лежит выше области организации потенциально устойчивого управления и есть запас устойчивости системы.
Теперь, исходя из ранее проведенной работы в 5 практике
в главе /7. 4. 5. ПФУ 3 целеполагание/.
Мы, имеющиеся там данные, преобразуем в наши области контроля и выявим дополнительные параметры, от которых будет завесить устойчивость управления.
По сути, наша задача заключается в том, чтобы для выбранных ранее режимов и способов управления метрологически состоятельно определить:
- область потенциально устойчивого управления ОПУУ.
- область допустимого управления ОДУ.
- область нормального качественного управления ОНКУ.
- запаса устойчивости по основным возможным критическим и возможным аварийным параметрам ЗУ.
Таб. 7. 4. 6. -20
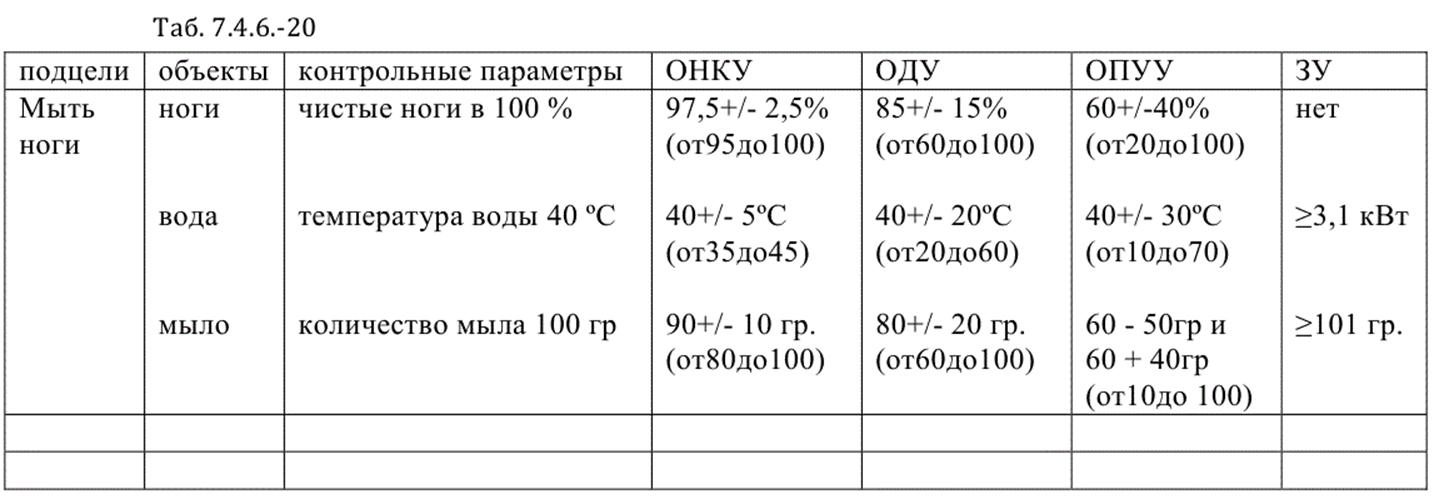
Где:
ОНКУ – Область Нормально Качественного Управления.
ОДУ – Область Допустимого Управления.
ОПУУ – Область Потенциально Устойчивого Управления.
ЗУ – Запас устойчивости.
Замечание. Колонку Запас Устойчивости следует сделать шире, дабы пояснять дополнительным текстом имеющиеся там значения, либо сделать дополнительную таблицу, как показано ниже.
Для понимания немного расшифруем, к примеру,
Для мыла:
Область потенциально устойчивого управления (ОПУУ) = 60 грамм плюс 40 грамм и минус 50 грамм, т. е от 10 грамм до 100 грамм. По сути, огрызком в 10 грамм уже мыться нельзя и поэтому идёт срыв управления. Следовательно, если увеличивать количество мыла от 90 гр. и более это будет уже некий Запас устойчивости (ЗУ).
Для температуры воды:
Область нормального качественного управления (ОНКУ) = 40 ºС плюс 5ºС и минус 5ºС. По сути имеем комфортную температуру от 35 до 45 градусов чтобы мыть ноги.
И далее надо вообразить, что допустим, чтобы нагреть эту воду надо 1 кВт электричества, для ОДУ уже 2 кВт, а для ОПУУ – 3 кВт. Следовательно, все, что выше 3,1 кВт это будет у нас запас устойчивости.
Особенно стоит пояснить колонку запас устойчивости.
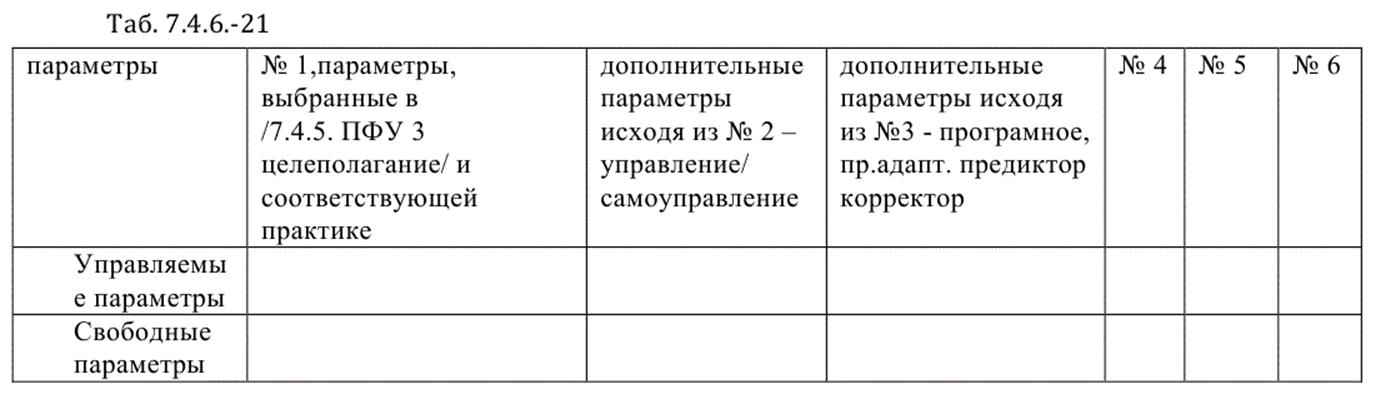
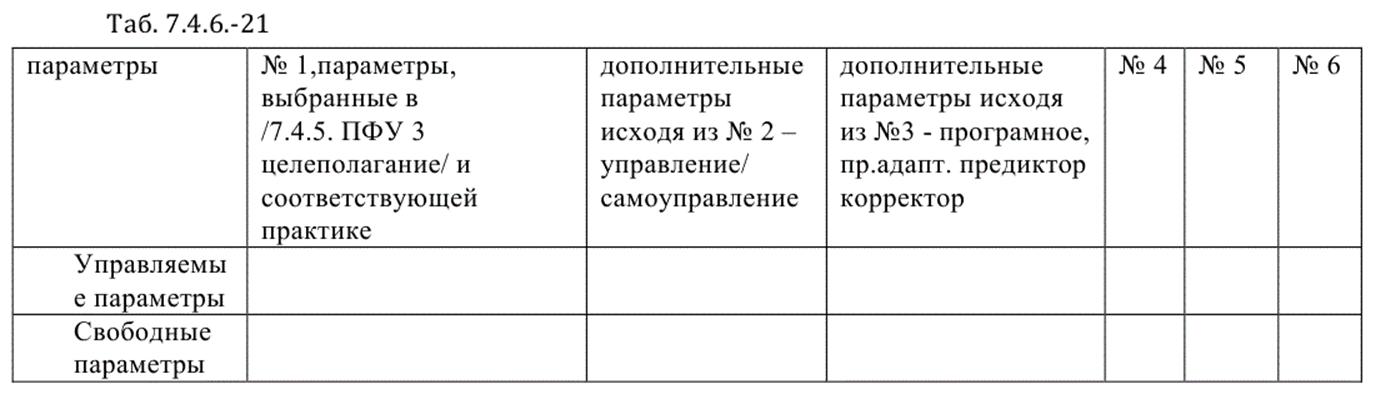
Таб. 7. 4. 6. -21
7 практика
Выбор Вектора Управляющего Воздействия.
То, как мы влияем на доступные нам контрольные параметры, через их возможное изменение и есть вектор управляющего воздействия.
Не помешает ещё раз прочитать 7 параграф в главе /7. 3. 4. Формирование концепции/
На этом этапе тренировок нам необходимо взять то, что мы наработали в параграфе
«6 практика по Вектору текущего состояния» в главе /7. 4. 5. ПФУ 3 целеполагание/.
То есть, нам нужны данные, которые мы внесли в заполненную таблицу. После чего, ещё раз проработать управляемые параметры для управляемых объектов и свободные параметры, но с учётом всех пунктов, формирования концепции управления, прогоняя их через все предыдущие пункты и практики, которые мы проходили выше.
- Определение Устойчивости в Смысле Предсказуемости.
- Выбор исходя из Шести приоратов управления с выбором между управлением и самоуправлением.
- Выбор из вариантов – Программное, Программно-адаптивное, Предиктор-Корректор
- Выбор из вариантов – Структурное, Бесструктурное, Виртуальное.
- Выбор из вариантов – Балансировочный, Манёвр.
- Выбор области потенциально устойчивого управления и устойчивого управления
То есть, берём фактор среды и главную цель и для всех подцелей придумываем, т. е. выявляем через воображение основные необходимые, управляемые параметры и свободные, учитывая все выше указанные практики с 1 по 6.
То есть, мы должны все выше выбранные данные совместить, убрать разногласия и нестыковки, выявить дополнительные данные, всё занести в новую таблицу. К примеру, ранее мы выбрали для некой цели способ управления, который не будет нас удовлетворять по тем параметрам, которые были нами установлены, для качественного управления, поэтому нам придётся либо менять данные, либо менять способ управления, что в свою очередь приведёт к рассмотрению дополнительных данных.
Делаем таблицу для каждой подцели на основе выше указанного перечня с 1 по 6.
Таб. 7. 4. 6. -21
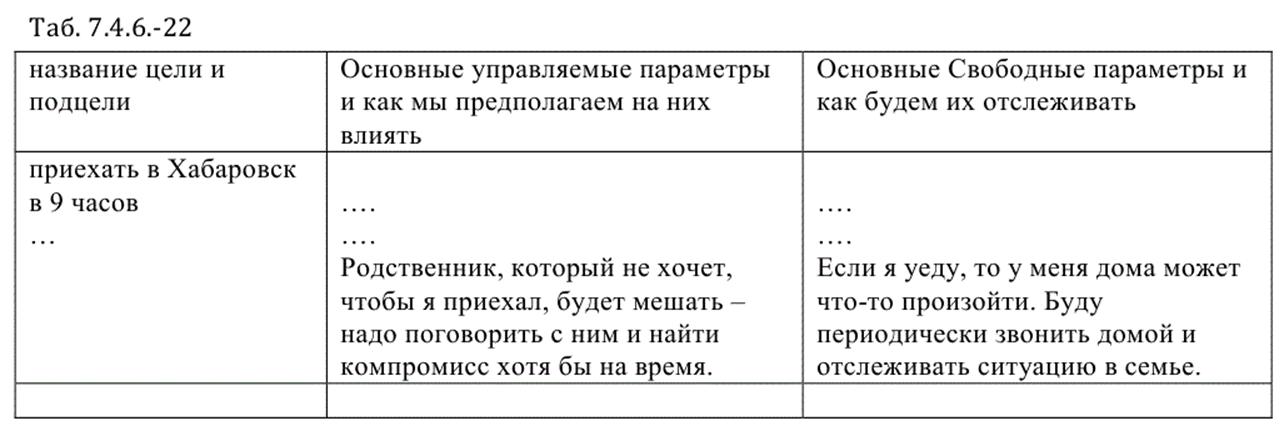
После этого заполняем новую таблицу для каждой подцели, в которую, грубо говоря, сводим все параметры и пишем, что мы с ними будем делать, и как это будем делать и как отслеживать.
То есть, если управляемый параметр, к примеру, чистота носков – то, как мы будем его добиваться и как оценивать степень частоты носков и как мы будем её измерять, если свободный параметр, к примеру, мыло, то, как мы будем учитывать его расход.
Таб. 7. 4. 6. -22

Теперь нам необходимо вспомнить параграф
6 практика по Выявлению потенциальных врагов и возможных противников
в главе /7. 4. 5. ПФУ 3 целеполагание/.
В той практике мы выявляли потенциальных врагов и возможных противников, которые могут появиться от наших действий.
Для того чтобы не упустить этот важный пункт любого управленческой деятельности, нам надо исходя из данных, которые мы воспроизводили в той тренировке, внести некие дополнения в созданную нами выше таблицу.
То есть, нам надо решить какие параметры нам необходимо отслеживать и что надо будет делать, если такой вариант воздействия со стороны наших противников начнёт реализовываться. По сути, надо добавить данные в виде нового пункта, либо в управляемые параметры, если мы сможем, к примеру, воздействовать на врагов. Либо занести данные о контрольных параметрах для отслеживания в колонку /Свободные параметры/, если мы никак не можем на данный момент повлиять на врагов.
После заполнения одной из колонки надо придумать вариант, дабы другая колонка тоже был заполнена своим вариантом. Именно через воображение и придумывание свободных и управляемых примеров воздействия наших предполагаемых противников мы добьёмся некого автоматизма по выявлению схожих ситуаций и по жизни.
Так что не ленимся и делаем всё для 40 ситуаций
Таб. 7. 4. 6. -22
8 практика
Формирование Концепции Управления.
По большому счёту, в предыдущей практике, когда мы заполняли колонку с основными управляемыми параметрами и предполагали, как на них мы будем влиять, и в другой колонке, как мы будем отслеживать, основные свободные параметры, мы, грубо говоря, формировали частные концепции управления.
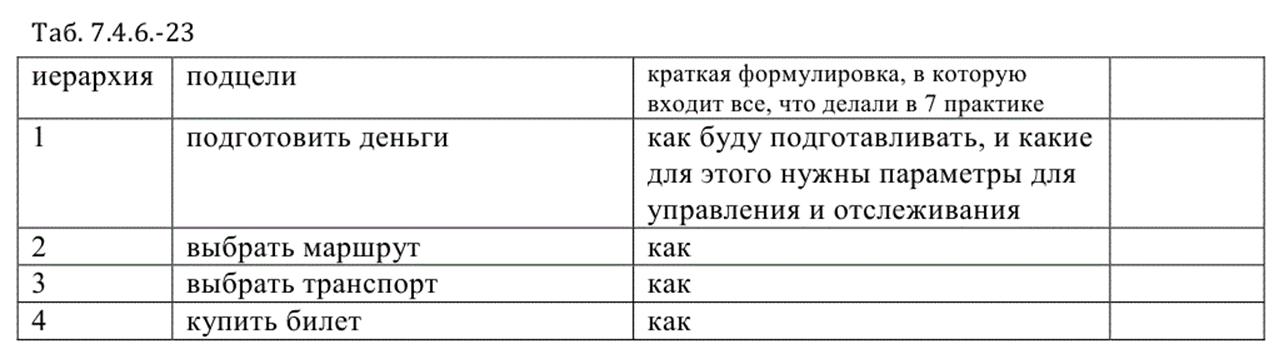
Теперь наша задача заключается в том, чтобы все частные концепции управления выстроить в некую иерархию, подчиненную логикой события на основе, либо мерой от времени, либо мерой исполнения. Либо любой другой мерой, которая была выбрана ранее, как главный фактор, который подводит к реализации главной цели к уровню 100 процентного успеха.
К примеру, нам надо доехать до Хабаровска. Чтобы это осуществить, мы должны выполнить ряд действий, которые должны идти строго друг за другом. Подготовить деньги, выбрать маршрут, выбрать транспорт, купить билет, собрать необходимые вещи.
У нас должен получиться некий перечень подцелей с соответствующим перечнем частных концепций реализации подцелей в некой иерархии.
И самое главное в нижней таблице в колонке /Краткая формулировка/ должны быть формулировки, как будут реализованы подцели, то есть, частные концепции в неком совершенном виде.
А мы знаем, что такой вид достигается исключительно через разбор на:
Материю + Информацию + Меру.
То есть, делаем полноценный разбор и даём определение. И уже определение заносим в таблицу. Не ленимся, делаем временные таблицы по МИМ и формулируем полноценные определения. Надо добиться такого автоматизма, чтобы к сороковому (40) примеру, вы практически без использования временных таблиц, практически в лёт, могли всё сформулировать для каждой подцели по МИМ.
Фактор среды – родственники просят приехать в Хабаровск.
Цель – приехать в Хабаровск завтра к вечеру.
Подцели:
Таб. 7. 4. 6. -23
Отдельно для каждой подцели необходимо учесть ранее выбранные нами в первой практике этого документа управляемые объекты защиты, дабы определиться с дополнительными условиями по организации мероприятий относительно Техники Безопасности.
Если вы будете всё намеченное реализовывать в одиночестве лично, то всё выше сделанное в последней таблице для вас будет Концепцией Управления.
Если вы хотите организовать коллективную работу и привлечь соратников, то тогда необходимо распределить подцели по исполнителям, назначить ответственных, определить график контроля и ещё раз пройтись по всем выше пройденным пунктам формирования концепции, дабы учесть все нюансы именно коллективной работы как единиц в суперсистеме.
Следующая страница ➤

Данилёнок Вадим Евгеньевич
С этого места Вы можете бесплатно скачать книгу по материалам сайта и выразить благодарность автору по указанной ссылке
СКАЧАТЬ КНИГУ БЕСПЛАТНО
или нажав на верхнюю картинку
* * * * * * * * *